Front
Back
Left
Right
|
Front |
Back |
|
|
|
|
Left |
Right |
|
|
|
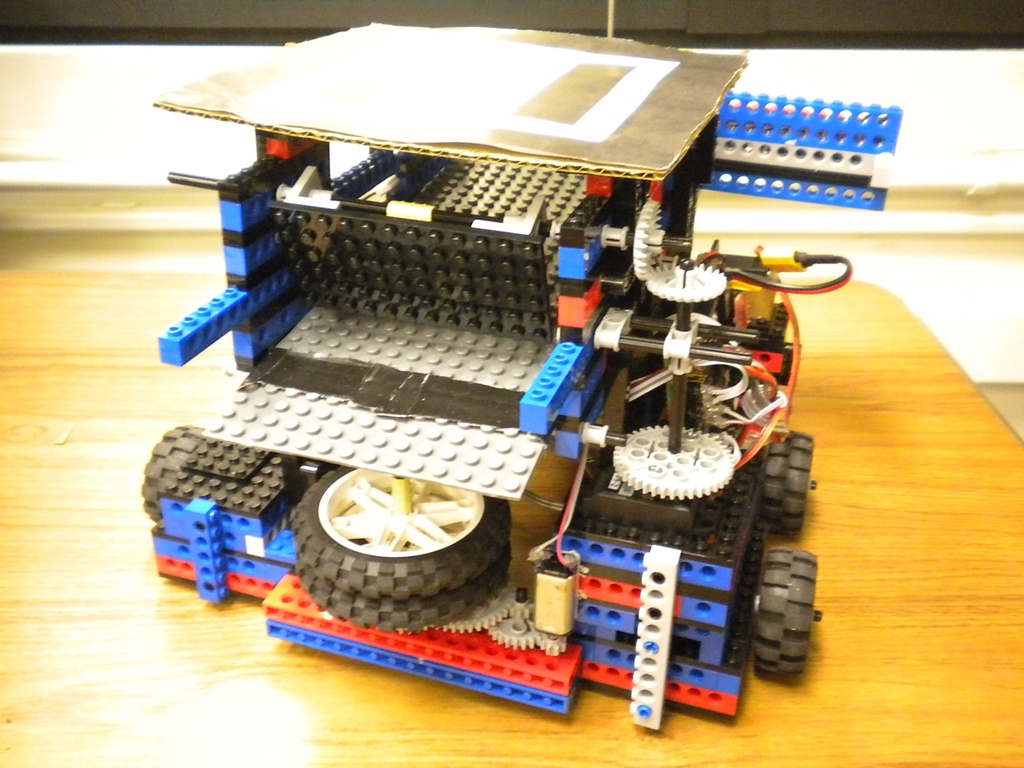
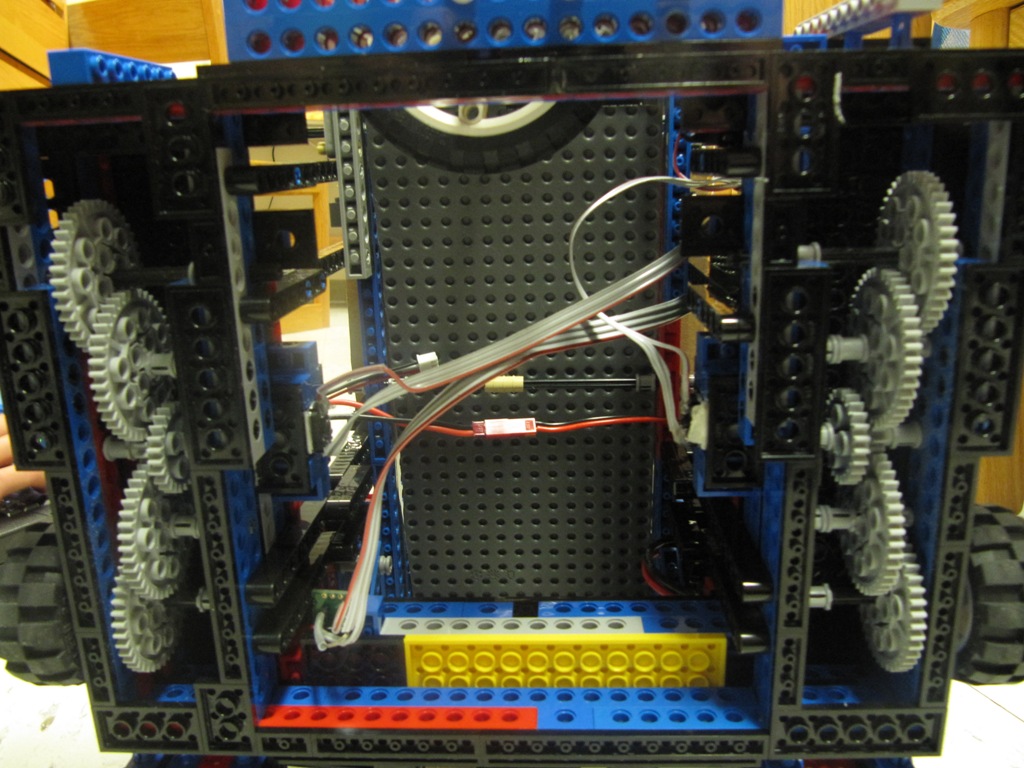
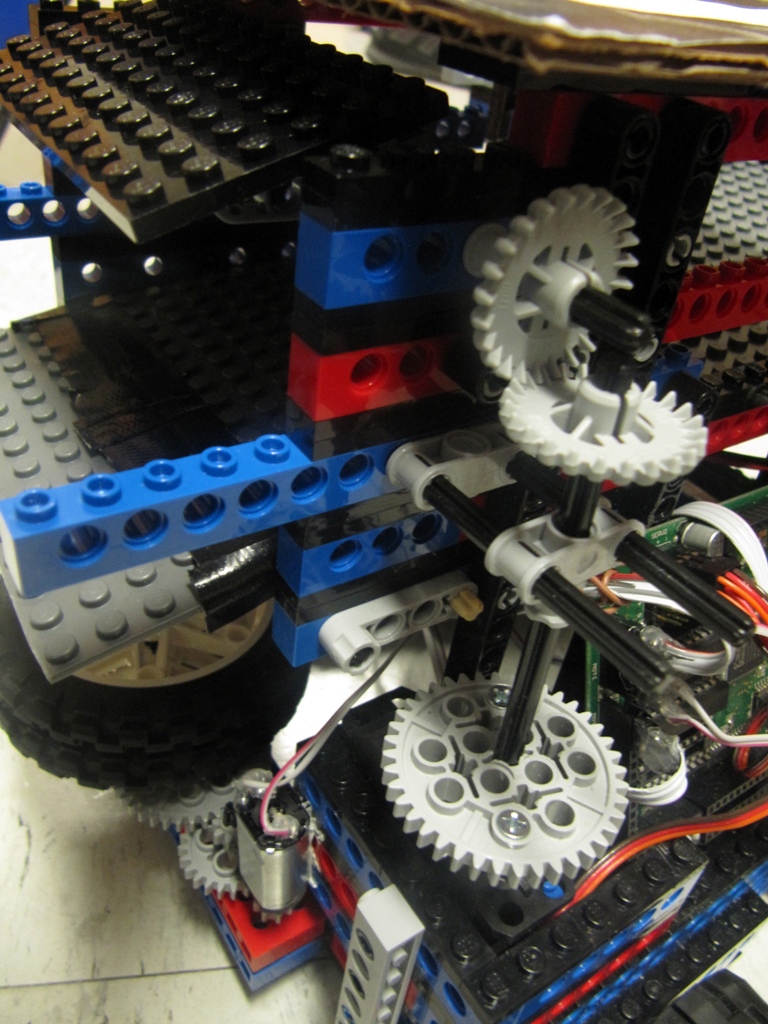
The GearboxesThe robot implements differential drive; it can be divided into two symmetrical gearboxes, each of which controls half of the robot’s motion. Each gearbox has a 75:1 gear ratio that controls both the front and back wheel for its respective side of the robot. |
|
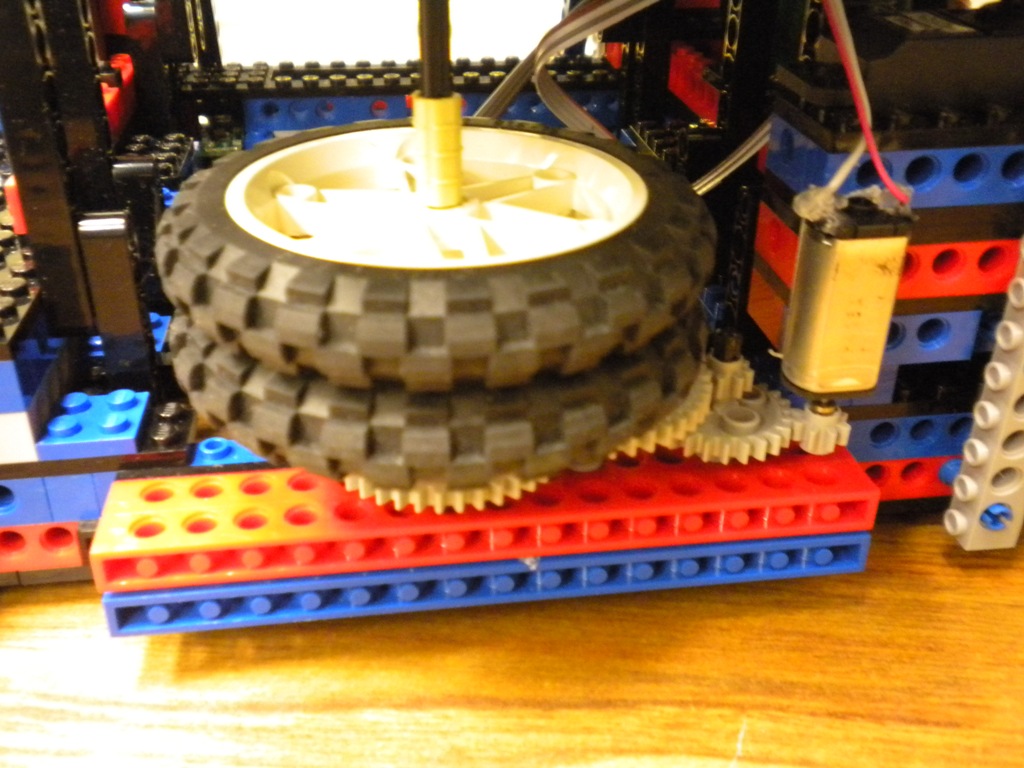
The RollerThe roller, consisting of two tires, is used to capture territories by turning the gearboxes in the direction corresponding to the team color. The roller is powered by a motor and several gears that form a 75:1 gear ratio. Originally, a 5:1 gear ratio was used; however, this low gear ratio could not turn the gearboxes on the field. Thus, the gear ratio was increased in order to have enough power to capture territories. |
|
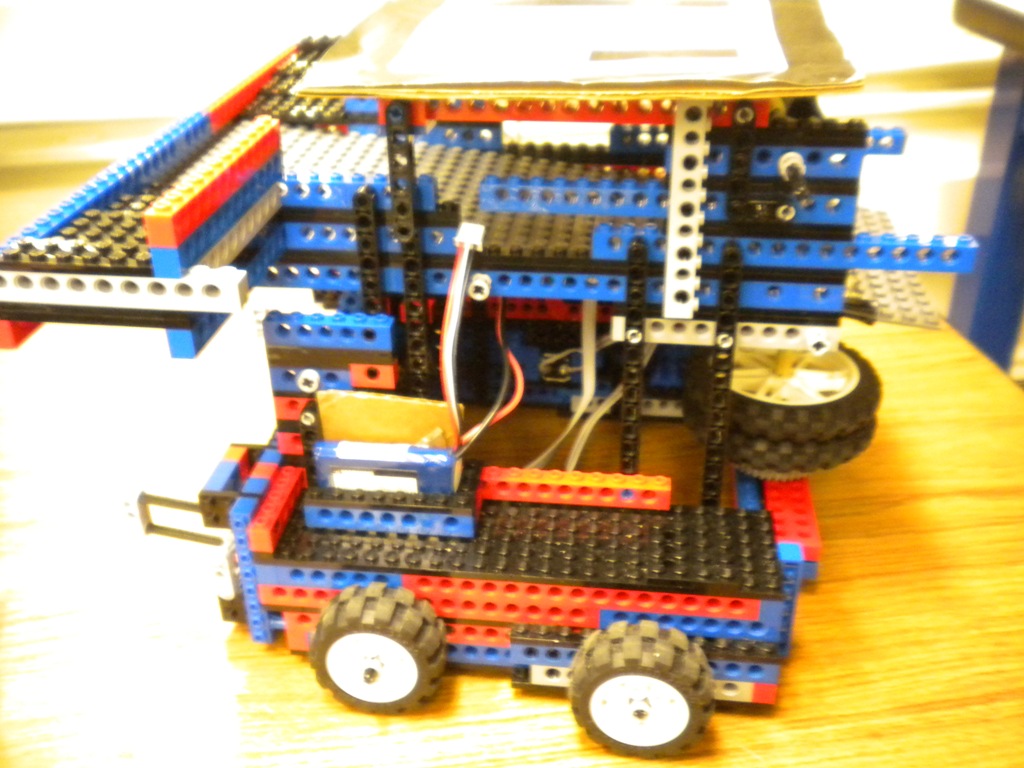
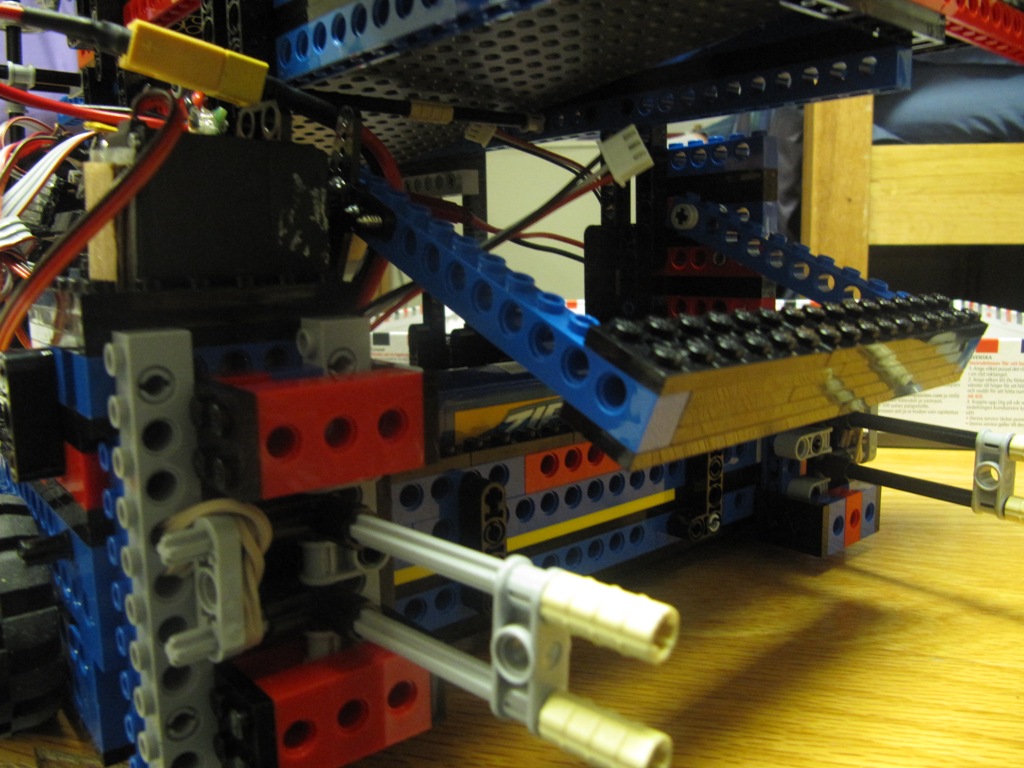
The LeverFor the lever mechanism, we tested several different designs. We initially thought of a motor-driven, slowly turning pair of wheels with axles connecting the edges that would catch and push the lever. However, we decided on a servo controlled mechanism because it took up less space. With imprecise navigation, we got more consistency by placing struts that would stop the robot at the ideal distance for lever pushing. This strategy prevented the lever mechanism from jamming against the wall. |
|
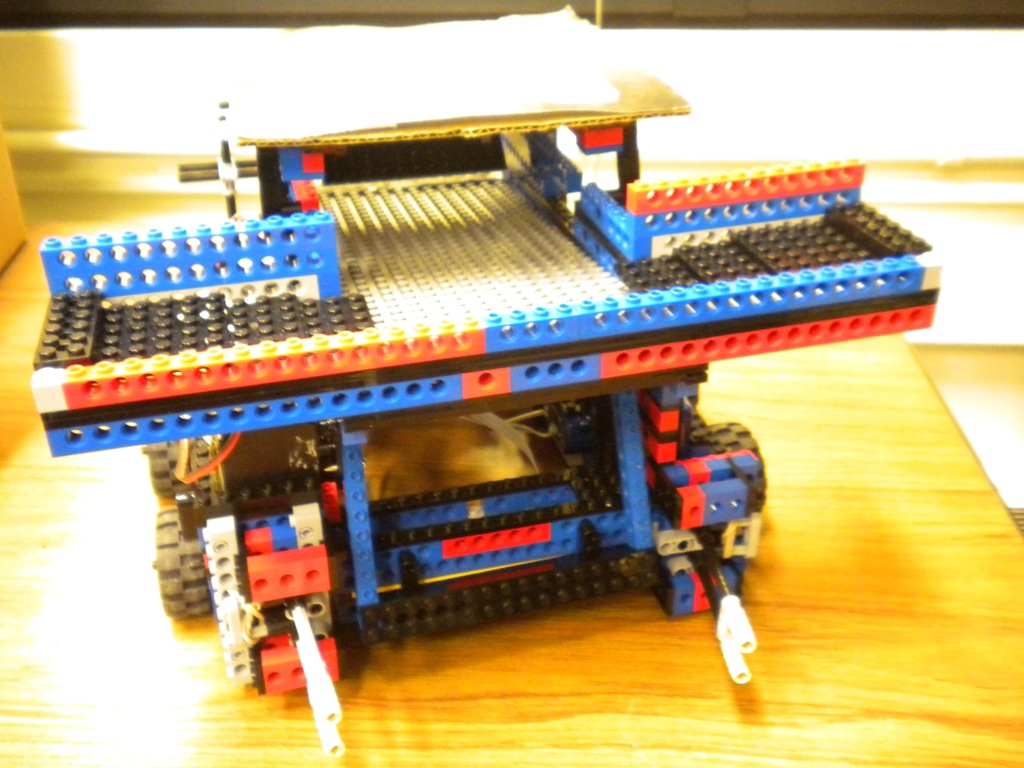
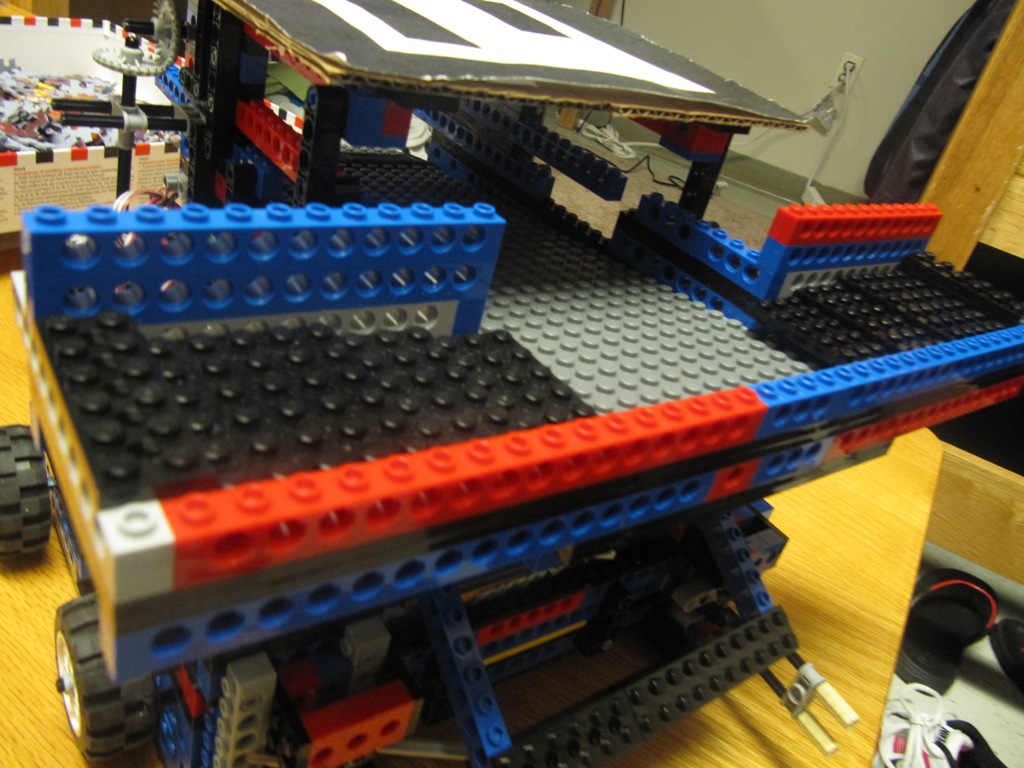
The CageThe cage sits on tall braces that hold the robotic chassis together and is used to hold ping pong balls on their transit from the lever to the center of the playing field. The cage consists of a thin, gray Lego piece that is supported by several struts underneath. The Lego piece is at a slant, allowing the ping pong balls to easily fall to the back of the cage as it fills up. The opening to the cage is wider than the rest of the cage, allowing as many balls to fall into the cage as possible. On both sides of the opening, black Lego pieces are layered to funnel ping pong balls to the rest of the cage. |
|
The ReleaseThe release mechanism holds ping pong balls in the cage until Dalek reaches the center of the playing field. At which time, the release mechanism is opened to allow the ping pong balls to roll out of the cage. The release mechanism is controlled by a servo, which turns two bevel gears at specific angles to open and close a Lego piece door. |
|
Not seeing the navigation panel? Click here to create a navigation panel.