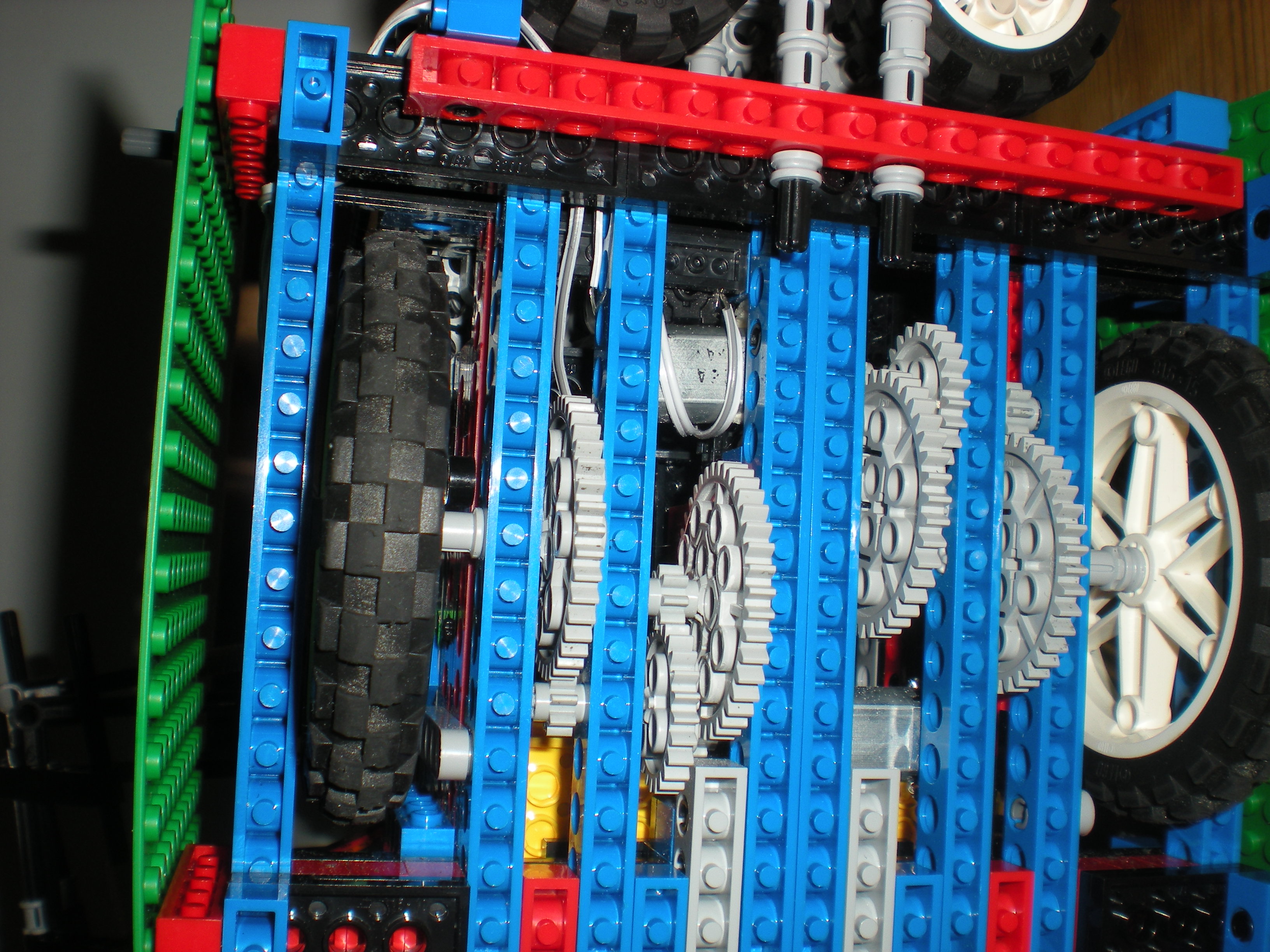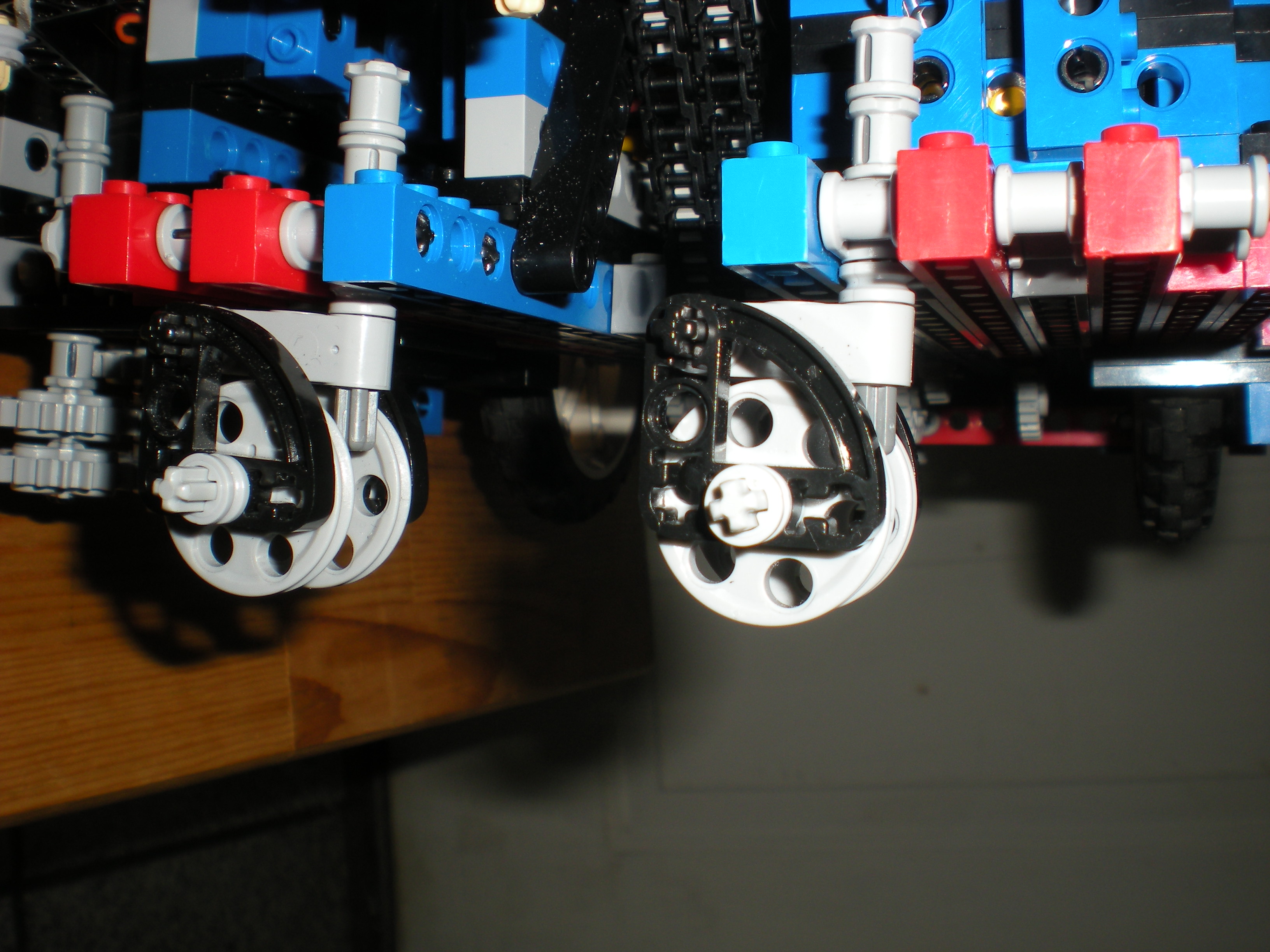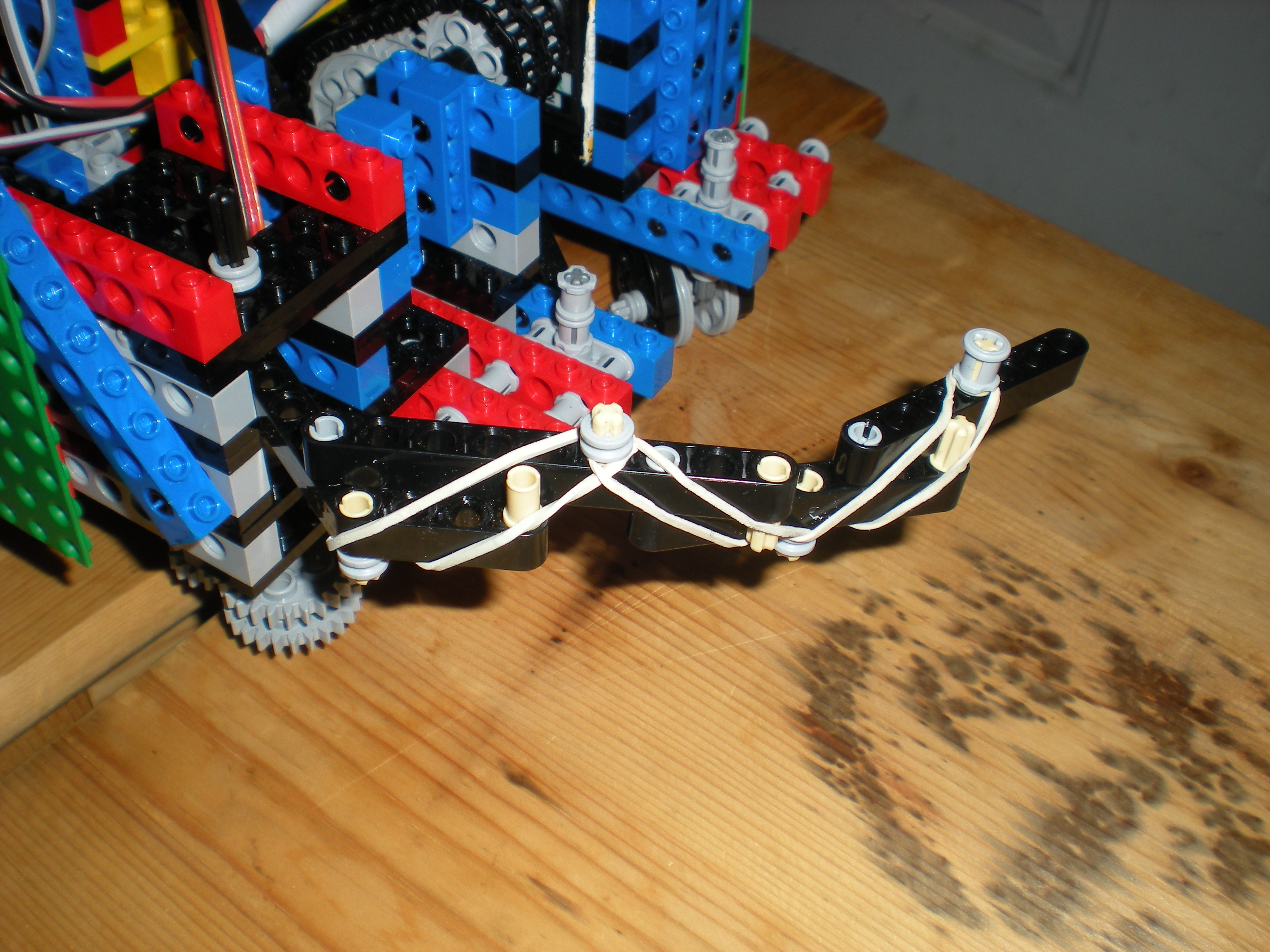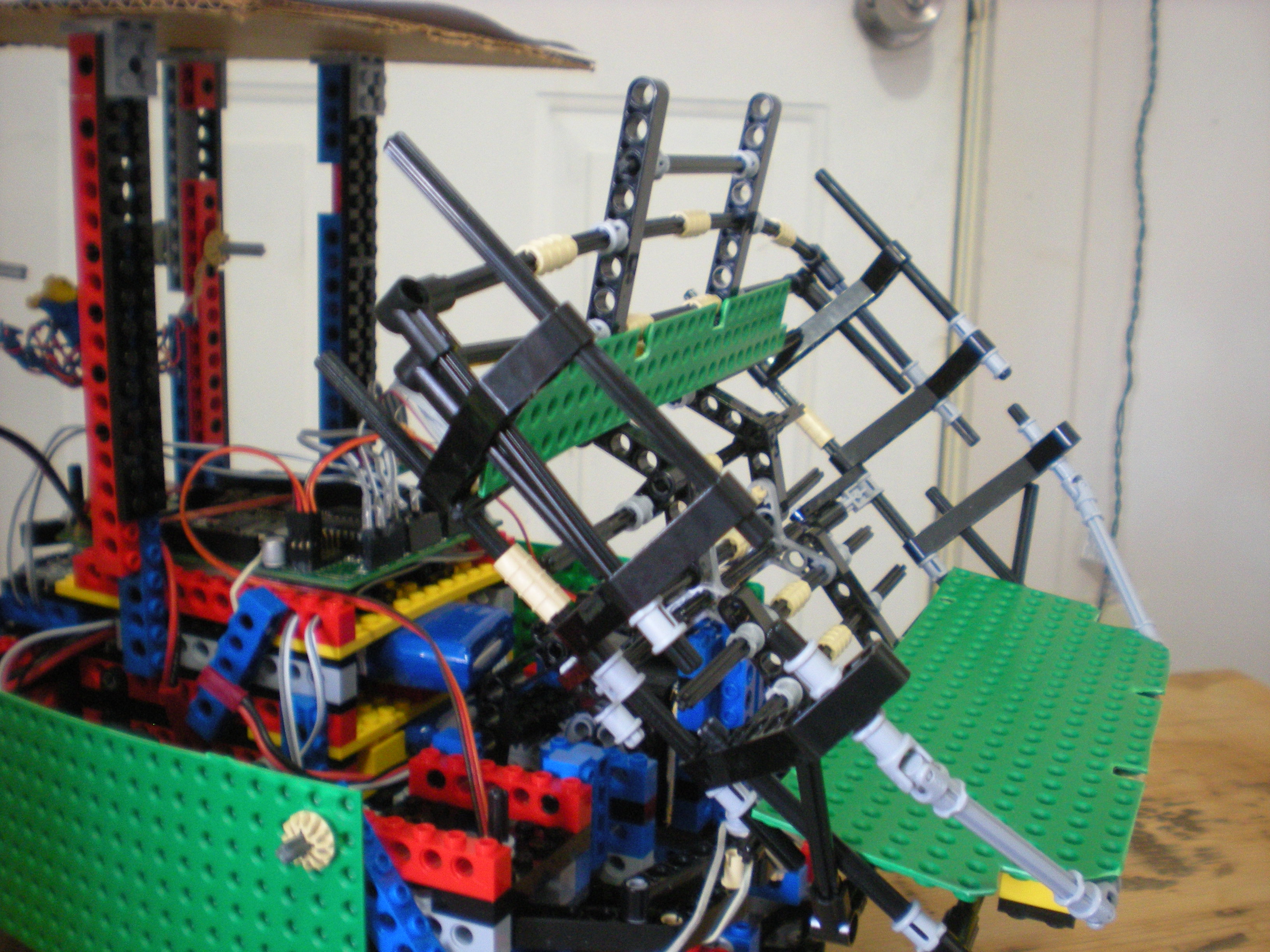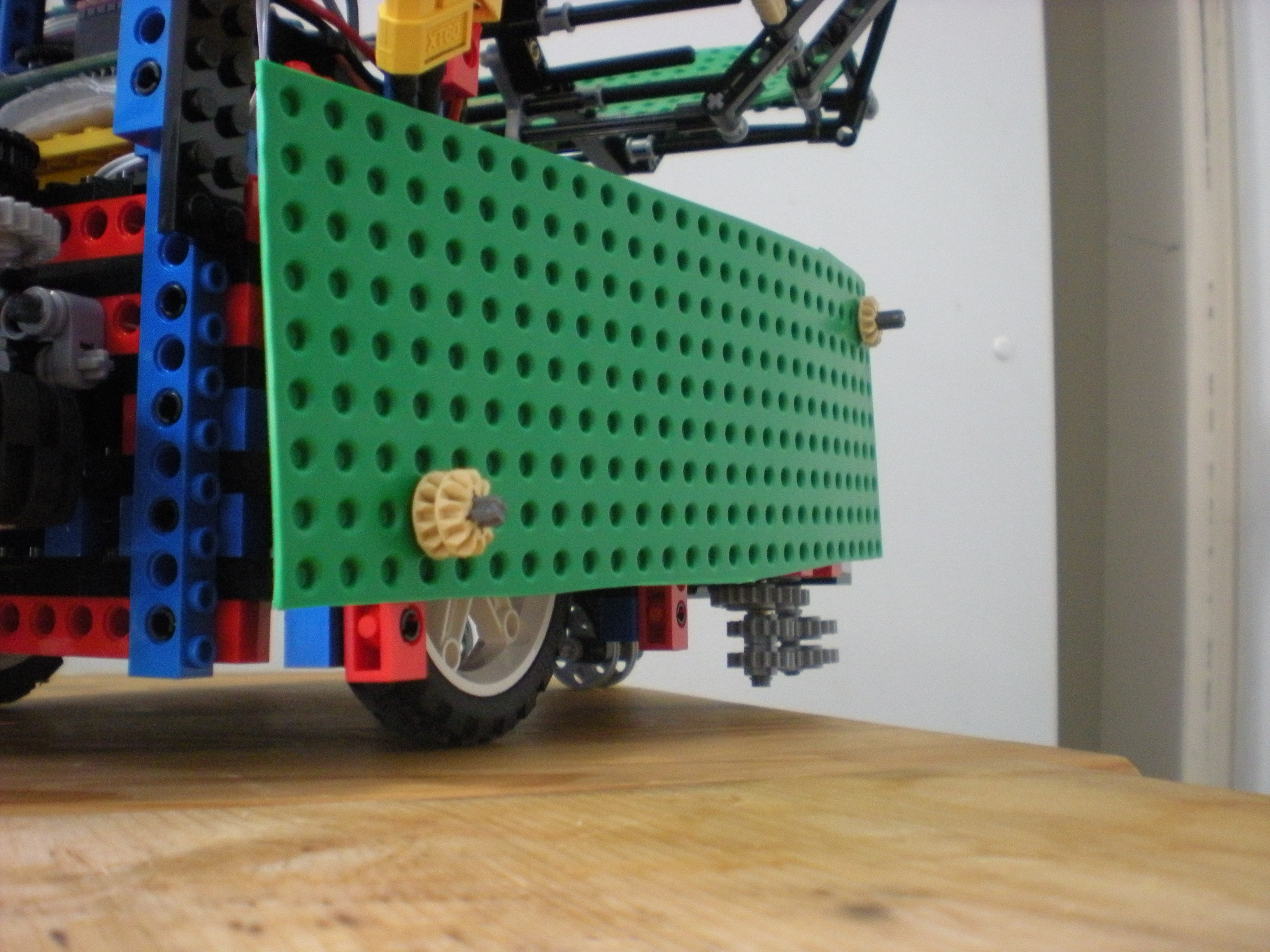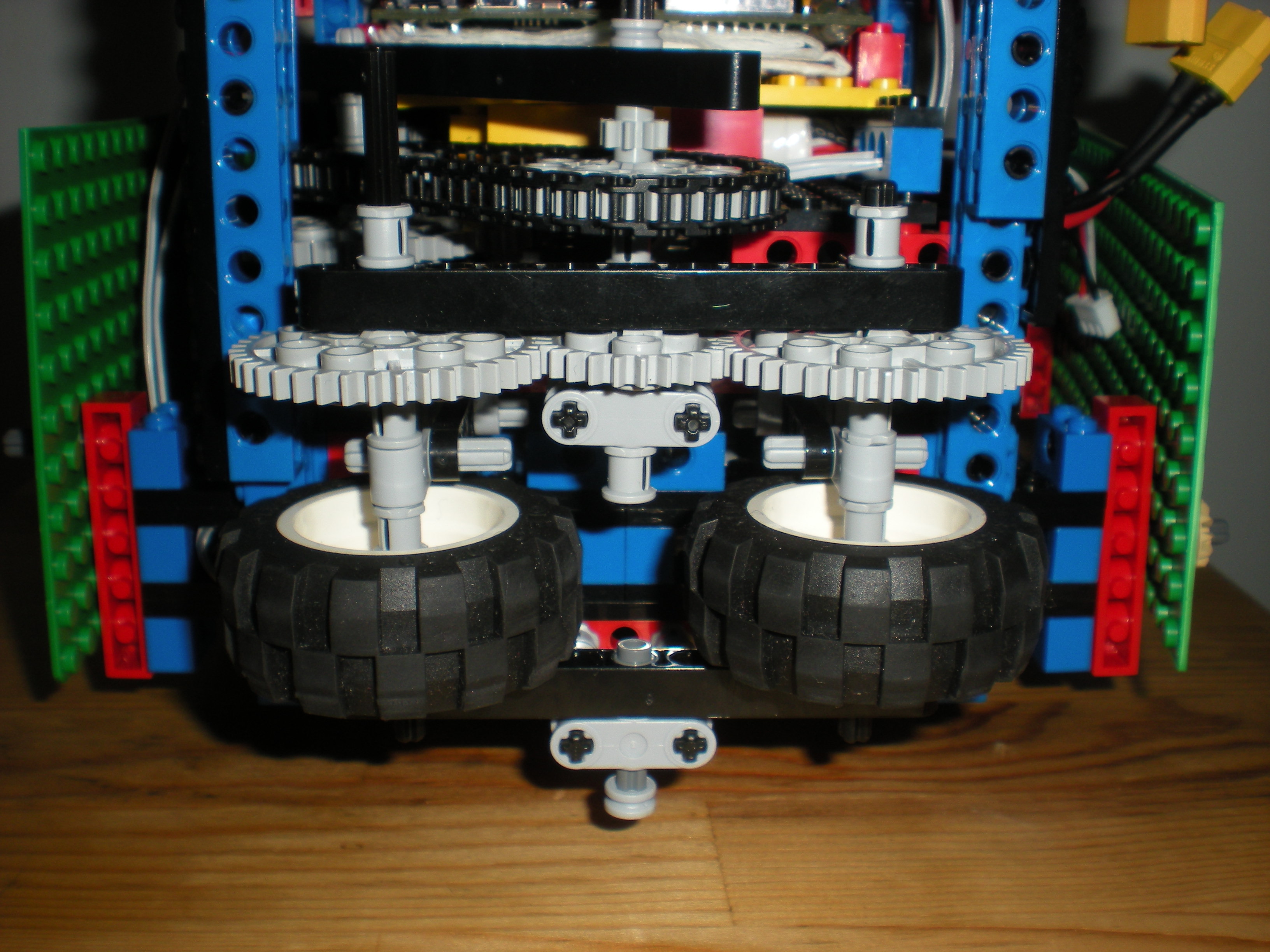
The spinners used to capture territories went through two, fairly similar, phases of design. We first built a housing for a third motor within the existing gearbox. The motor was able to sit on a beam between the gears used in movement and be braced on four sides above that. A gear ratio of 45 was used for the spinner, allowing them to spin fairly quickly. The initial set of spinners was held up only on top by the pieces seen in the picture and had a different, smaller set of tires. However, these tires would often get stuck and the whole setup would bend towards the robot due to support coming only from the top. So, the final design features larger, more robust tires with bracing on top and bottom so as to keep them aligned and avoid bending.