The No Name Robot
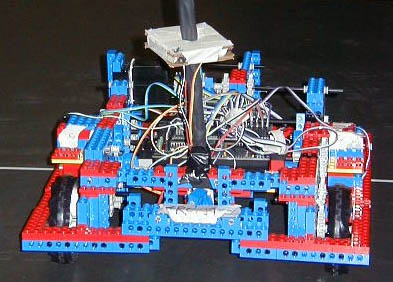
No Name Robot - Front View
Our strategy went through many iterations. The final strategies were very simple and straight foward. For the qualifying round, "Old Strategy" (our robot's name in round 1, named after the running joke about our original goals, see Pipe Dreams) attempted to pick up the two known hackers and return to jail.
For round 2 (and ideally onward), "The No Name Robot" was supposed to go to Mass Ave. rescue the two professors, pick up the professor to the right, and return them to our campus. The robot was then to capture each of the two hackers and bring them independently to our jail. We would then turn towards the opponents jail and attempt a jail break at full speed. This strategy would hopefully yield 17 points and possibly jail break.
The design called for a working rear gate to help carry blocks to the designated areas. Additionally, the robot needed to be able climb the steps of Mass. Ave, make a perfect 90 degree turn, and control a rear gate. Because we selected the less capable Handy Board over the unreliable RoboSkiff, we were limited to two drive motors. As a result, each side of the robot was controlled by a drive motor and a gear box, while steering was accomplished via Differential Drive. Three servos were anticipated (front gate, rear gate, and lift; see Pipe Dreams), although only one was used, controlling the rear gate.
The drive mechanisms were powered by a 75:1 gear ratio. This allowed the robot to climb the side of Mass. Ave. instead of just driving up Mass Ave. This supported our previous goal (see Pipe Dreams) of getting all four professors to dump in our opponents goal. Additionally, the 12"x12" chassis was designed to occupy the maximum amount of our opponents jail. While neither of these capabilities aided our robot in the competition, they contributed to the less than stellar results.
Turns were made simply by turning one motor foward and one motor backwards. This had been making perfect 90 degree turns quickly up until 4 hours before the first round. Additionally, electrical tape reduced the robot's friction to allow it to turn without the gears locking.
In the qualifying round, the lift mechanism (see Pipe Dreams) was partially built. The system caught on one of the turning gears, causing the robot to spin out of control, failing to actually score.
In round two, our robot successfully climbed Mass. Ave., but the right tires caught on Mass Ave. This caused the robot to spin out, and it jumped off the board while following the pre-programmed path. While failling to score any points, this illicited a cheer from the crowd.
Our final strategy was developed after viewing the qualifying rounds where several robots failled to leave their jail. Our strategy evolved as we learned our limitations.
Our original strategy involved extendable arms that could push the hackers in front of us, as well as knock the professors from Mass. Ave. onto our campus. The arms could extend, lift above Mass Ave., and move foward and backwards. It also required tremendous amounts of speed and a perfect, fast, block sorter. This combination exceeded the number of motor ports on the Skiff and required significant mechanical engineering talent that we lacked. This strategy ("Old Strategy"), was impossible to complete and was scrapped.
With the assistance of Eric Varady, we developed the second strategy. This strategy involved going for the four professors and dumping them in the opponent's jail. The idea was to go up the side of Mass. Ave., getting the first professor. This professor was to be lifted up while we climbed Mass. Ave. and got the last three professors. We would then enter our opponents jail, dumping the elevated professor into the bottom of our robot to join the other three. Utilizing the intricacies of the rules, we would open one of the gates, preventing the classification of possession. To prevent us from creating a jail break, there was a piece on the rear gate that would initially be touching the ground, but would not be touching the ground when the gate was relifted at the end.
Line Following. Many hours were spent wiring up LED and phototransistors to develop a line following system to prevent our robot from being totally stupid. In an attempt to shield ambiant light, a system involving the motor ports was created to power the LEDs on and off. Despite figuring out the correct resistor and a massive wiring job, as well as lots of code to test the system, it was dropped to save a few precious hours that would have been needed to mount and test the system. Given the difficulties that other teams had with line following, this was probably fortunate.
All in all, we developed multiple strategies to maximize points. We worked under the assumption that there would exist a perfect block sorting robot that could get 24 points from their own side of the board. Unfortunantly, even our simple strategies were too complex for our team to implement, leading to substandard results.
Team 11 would like to thank the following individuals:
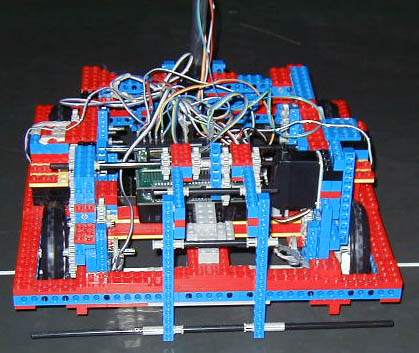
No Name Robot - Back View