Pictures of The No Name Robot
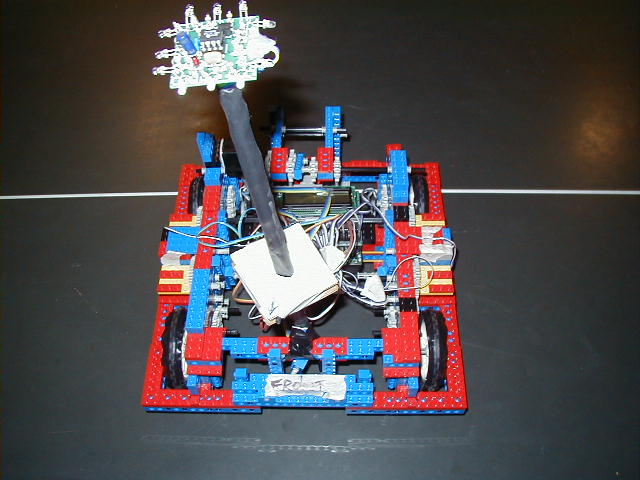
An aerial view of our robot
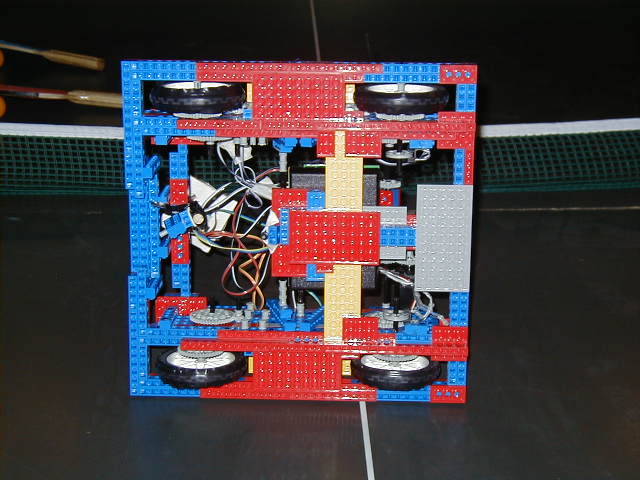
The underside of our robot
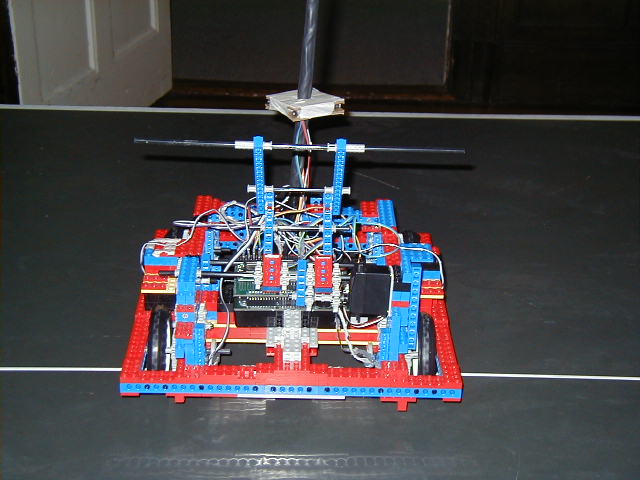
No Name with its rear gate raised
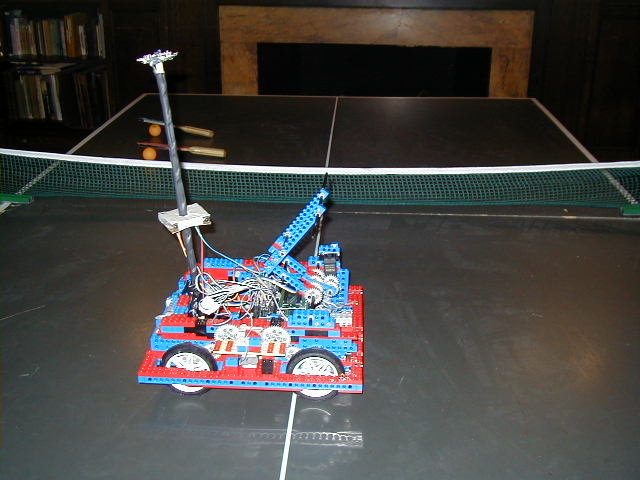
A profile with No Name's gate raised
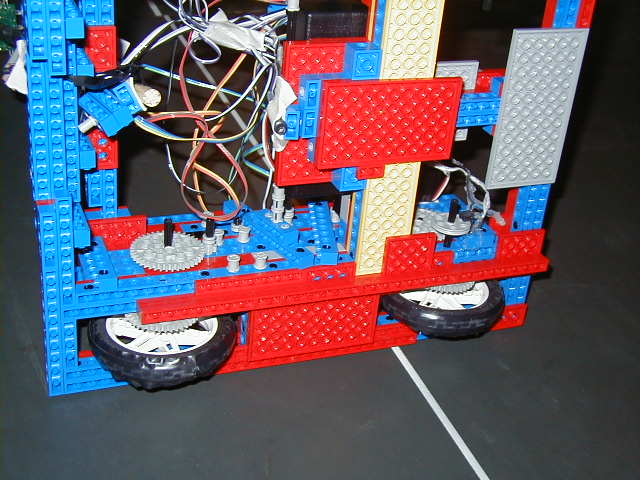
The gears driven by No Name's motors and the shaft encoder used to determine how far it's traveled
The black circle in the center at the top of this picture is the polarized light sensor No Name used to detect when the start light was illuminated

The brains of the operation - here you can see the Handy Board controller that executes programs written in IC to manage No Name's motors, sensors, servo, and infrared beacon