 |
 |
 |
|
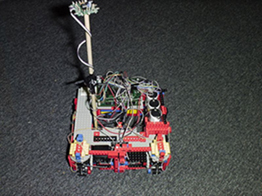
Our robot - Sub-Zero
|
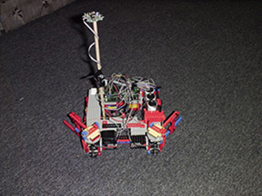
Sub-Zero angle 2
|
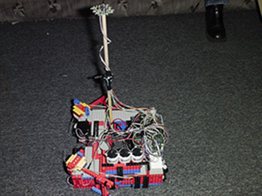
Sub-Zero angle 3
|
 |
 |
|
|
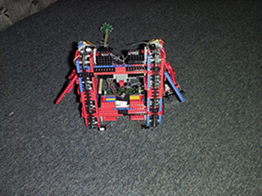
A view of our treads
|
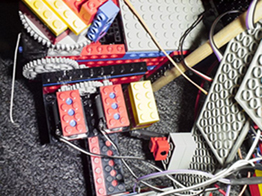
Our gear box
|
Team 12: Sub-Zero
Daniel Fisher: 6-3
Rocky Bryant: 6-3
Jim Goodman: 6-1
Introduction
Sub Zero is our robot in the 6.270 Autonomous Robot Design Competition. Our machine is so named because Sub-Zero was the hockey-playing gladiator sent to destroy the running men. Our robot was given this name for its planned strategy and similarities to this character. (I say planned in that as you will find out from reading further our robot’s actual performance did not reflect our planned strategy, hopes, and expectations.)
Strategy
Our “planned” strategy was simple, at least we thought. We wanted to orient ourselves as quickly as possible using CVS light sensors, go straight over the center steps of Massachusetts Avenue hitting the two central professors back by way of two hockey stick-like arms and then proceed to ram the other machine. We thought our strength would lie in our robustness and unique design that would allow for a lot of punishment without failure. We built our original structure many times over changing strategy and design and finally came up with our final robot. This final robot survived the waist high drop test. These features resulted in us naming our robot Sub-Zero, the ultimate destroying machine.
Design
Sub-Zero’s final design was many generations different from our original plans. First we tried to employ a robot similar to that of last year’s victor. We tried to mimic Hermes’ tricycle design with two rear wheels using a differential and one front steering wheel on a servo but this proved to be a design that did not match our strategy. From then on we moved to a simpler tank design. We built and rebuilt tanks until we came up with Sub-Zero whose most unique design feature involved using extended treads. We were able to accomplish this by alternating tank treads with the chain treads resulting in a robot that would meet our strategy. Its extra large surface area touching the table along with four motors on each tread would give us the power and traction to destroy.
Drive/Steering
Sub-Zero is a tank design and thus this design allowed for us to use a simple differential drive for the steering. After experimenting as explained above and due to the tardiness of receiving our controller board, we felt a differential drive would be better and easier to implement.
Structure
The main structure that was waist tested is symmetric. Sub-Zero was built in a modular fashion. A tread/tread casing was built and than they were connected together into Sub-Zeros frame. This frame was then braced on its outer side. We tested multiple gear boxes/ratios and came up with a ration of 75/2. We built matching gear boxes and attached them in similar symmetrical fashion. Each gear box contained two motors giving us four motors on each tread. This allowed for greater torque and a stronger robot. We tested our robot and it was able to push large amounts of weight easily.
Sensors/Actuators
Sub-Zero employed the use of eight motors, four on each tread. We used five CVS light sensing cells, 4 for orientation and one for the starting light. We also used a servo to deploy our hockey arms. We used two shaft encoders to tall how far each tread had turned. Lastly we used four touch sensors that would detect if we hit a wall or another robot. Ideally it would have been nice to use the five IR detectors we bought, except Sub-Zero could not even perform the basic functions we tried.
Competition
In competition day we failed to qualify for the second round. Our robot did not orient well and it ran into the wall stalling four motors while the other four were still running. We made much effort to attempt tocreate a working robot the following day, but our orienting never would correctly work and we failed to qualify.