The members of Lucky 13 :
Shastri is a course 6 and 15 major in his 3rd year at MIT. Yogishar is a Mathematics (course 18) major while Anant is undecided between 6 and 17. Both are sophmores.
Shastri is a course 6 and 15 major in his 3rd year at MIT. Yogishar is a Mathematics (course 18) major while Anant is undecided between 6 and 17. Both are sophmores.
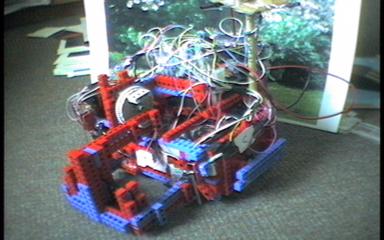
We call our robot GOBAR because we could not think of anything else to call it. GOBAR could stand for the acronym GOOD OLE BAD A*SED ROBOT or it could stand for something else in another language. Either way, the name reflects what we feel about our robot.
To win 6.270
Get the 6 EDP credits
Build a Y2K compliant Robot
At the start of the round the robot orints itself. If this works, the robot then moves forward until it grabs any block. Throw the block at our opponent's robot. If their robot still moves (check using the IR becon) crash into their robot. If our robot survives the crash grasp the opposing robot with our claws and hold that robot over the edge of the board until the end of the round. At end of round, shut down (time out), this should result in one less competitor to deal with.
Origianlly we had decided to go up Mass Ave. , grab the two professors on the top of the ramp, pull those two professors onto our side of campus. This would give us 6 points and prevent the other team from getting those two professors.
We would then palce the two known hackers into our jail. Then, if the opposing robot was on our side of campus we would ram it, else we would sort our blocks using the light reflecting sensors and place the detected hackers into our jail.
Unfortunately, the late arrival of the controller boards, the inability of the shaft encoders to work properly, the inablitly to get the packaged light sensors to work and lack of robust code to interface with the controller boards caused us to scale back on our plans.
We decided to create a robot than turned depending on the voltage of the battery pack, the robot would then go, grab one of the known hackers, place this hacker in our jail and then randomly move about the board.
This strategy, if the battery had the correct voltage would result in a minimum of 4 points each time.
Throughout the contest there was only one team which consistently scored the same points every time. This was Team 55 which always scored 14 points. (There were a few teams which also consistenlty scored 0 points but that is not relevant here). A consistent score of 4 would have been sufficient to make it to atleast the 3rd round of finals night.
Unfortunately, this was not to be. We entered the final night of the contest with a battery pack that did not have the appropriate voltage for turning. Thus we failed to grab the first hacker, our random movement resulted in our pushing a student block onto Mass. Ave resutling in us having a -1 score. Our opponent literally ran around in circles for that round resulting in their obtaining a score of 0. Thus we were eliminated -1 vs. 0 .
The organizers were kind enough to let us take part ina demo round with a battery pack having the correct voltage. In that round we scored 4 points.
The neat idea behind 6.270 is creating a design which in theory works beautifully but which in actuality is plagued by real world problems such as limitations on hardware and software, the actions of another robot, and the presense of unaccoutned obstacles such as significant bumps/cracks on the board and diminishing voltage supply.
I learnt a lot form this course: feedback, team work, continually adapting stategies up to the last miniute, knowing when to decide that you have spent too much time on a function which in the grand scheme of things is not really that important (prioritizing).
Click here to read about our journal of 6.270