
6.270 Autonomous Robot
Competition Team
Members:
Bots
in Blue - 2000 Aaron
Mihalik '02
Team 19 "Love the
Treatment" Marisa
Kirschbaum '00
Thomas
Mack '01
Our first design:
Our original plan was to sort
the blocks by color and we spent almost all of our time developing this
strategy.
The sorter was implemented
with a horizontal sliding mechanism and a color sensor. The sensor was used for determine whether
the block was a student or a hacker.
The hackers would be placed in the storage area and kept there.
An interesting thing about
this design is that the robot can 'score' whether or not it brought the hackers
back to the jail.
Assuming that there are
hackers in the storage area, then the horizontal pusher could be put in the
'push' position and the hackers would be in possession. Otherwise, the robot could be in the jail
with hackers in the storage area and have the horizontal pusher in the 'open'
position. In this instance, the hackers
would not be possessed.
Birdseye view of
the robot:
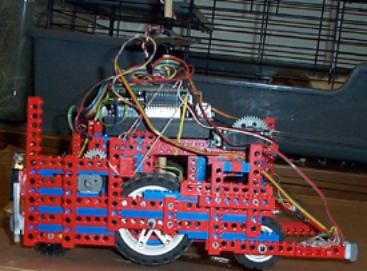
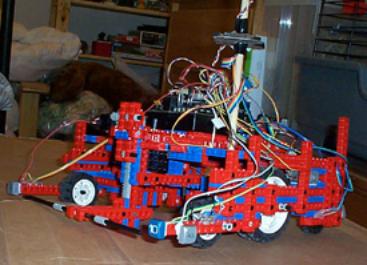
Pictures of robot:
<picture of completed
robot not yet developed>
Our next design:
We completely redesigned our
vehicle because we could not get the line following precision that we needed
for this sorting mechanism. Our new
machine used a 'trapping' technique for grabbing the two near hackers and the
two side professors.
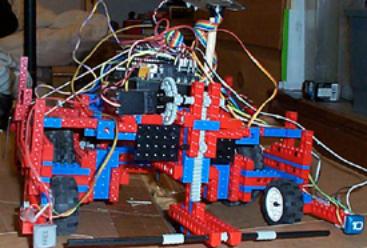
Birdseye view of
the robot:
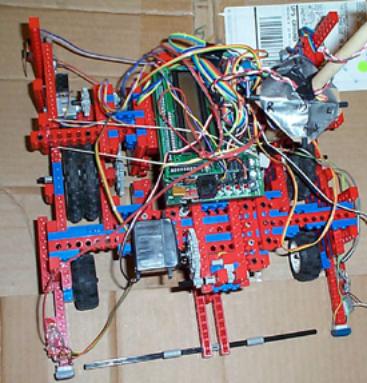
Pictures of robot:
--------------
ADM FEB 03 00