Brief overview:
- Don't lose.
More details:
- Move around the board in some pattern, preferably one which would most overlap with locations of blocks.
- Pick up blocks; recognize block type using dual reflectance sensors.
- Route said blocks into two containers according to their point value: hackers vs. students and professors.
- Eject blocks in locations which would yield the largest point value for our robot.
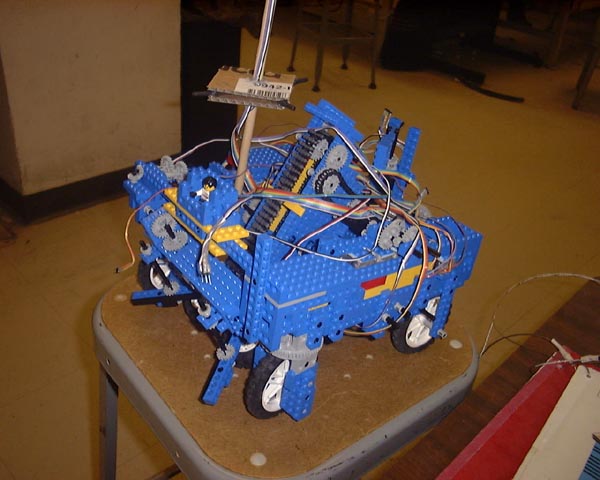
Our initial design included a conveyor belt (one uni-directional motor), intake wheels which would "suck up" blocks and toss them towards the conveyor belt (one uni-directional motor), a servo to route the blocks into either the left or the right block container, three motors per main gear train (left and right) and a bi-directional motor for the release door in each of the containers.The robot would move using two separate drive trains on the rear left and right power wheels. The front left and right wheels were free-spinning and were mounted on separate servo motors. This allowed us to rotate both on the spot and while moving, in different ways.
During this year's contest, we tried to use four different Skiff controller boards. The first one was issued to us, and it worked for some period of time. Unfortunately, after a while it started spuriously powering up motor ports which should not have been running, and vice versa.
The second Skiff controller board was very similar. After a while it too started having motor port problems, apparently induced by H-bridge failure, with symptoms such as non-functional motor ports and motor ports which would not power off.
We replaced it with our third Skiff controller board. We have come to the conclusion that it did not work properly to begin with; some of the ports ran with less power than others, and some didn't turn on at all.
After being told that there is no fourth Skiff board available, we opted for a HandyBoard. It proved to be significantly more reliable, and just as fast in practice at 2 MHz as the 200 MHz Skiff. It was also a lot lighter without the Hawker battery cells, and it drove motors at a higher speed due to the higher voltage.
Subsequently we were offered a semi-functional Skiff board which worked with the exception of the LCD display, but didn't go for it thinking it might not be our last Skiff.
Because the Handy Board has noticeably fewer motor ports than the Skiff, we had to compromise some features of our robot. We combined the front block intake wheel motor and the conveyor belt motor into a single motor. We also cut down on the number of driving motors to one per side, and increased the gear ratio on the left and right driving gear boxes. Also the door for the hacker container was replaced with a wall (since we still score points for possessing hackers) whileas the professor/student container remained with a single-motor door.Although our robot did not perform as well as we hoped it would, it still went up to the third round (first round of the finals), which could be considered reasonable for a robot which was heavily rebuilt and code written from scratch for the HandyBoard in less than 16 hours.
The failures were mostly due to insufficient time for coding. Towards the last 4 hours, we were unable to find a computer with a HandyBoard interface which we needed to fine-tune various parameters in our robot. We aimed for a simple strategy, which we thought could be reasonably well-implemented within our time contstraints, and still give the robot a chance to win a few rounds.
{kind=link}
{kind=link}