[Model]
[Implementation]
[Code]
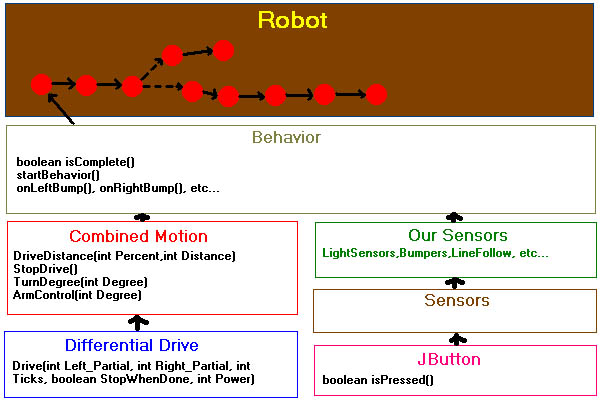
The robot was an event-driven system. By modifying the behaviors
and the sequences of behaviors, the overall task was reached.
We had to write our own DifferentialDrive class that was fast enough to keep up with the ticks. Combined Motion controlled all the motors to move the robot accordingly.
JButtons prevented a switch from sending two or more events to the robot. Sensors was their sensors class. OurSensors instantiates all of the sensors and gave them more readable names.
CombinedMotion methods and sensors were called from Behavior to have the robot perform the action. We made Behavior a base class, and extended it in all specific behaviors.
Robot consisted of an array that were pointers to an index of all behaviors.(see
code)
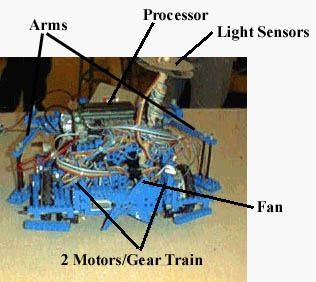
We used:
Motors
- 4 Motors for drive(2 Motors/Gear Train, 1:25 Gear ratios)
- 1 Motor for fan(not used in actual competition)
- 1 Servo for Arm control
Sensors
- 4 Light Sensors(on the dowel) for positioning
- 1 Light Sensor for start signal
- 7 IR Line Follow Sensors
- 3 Shaft Encoders(one on each drive wheel, and 1 on front wheel)
- 4 Buttons for menu-driven system
- 5 Bumpers for front(one on each arm)
- 2 Side bumpers(one on each side)
- 3 Back bumpers(only two were implemented)
The idea was to make a mobile, fast, and reliable robot. It would be able to out maneuver its opponents and either messes up their strategy or acquire more points than they do.
The initial strategy was to grab the two professors on the stairs and
run them into the opponent's jail, giving them -18 points!
However, this strategy failed due to our inability to get up the stairs.
Instead we modified the strategy to include getting the two
hackers on either side of the jail. Then a specially designed propeller
(fan) would knock any blocks that got caught in trying to back all the
way up the stairs. While the fan worked well, we still were not able
to consistently go up the stairs. The proper alignment was too hard
to acheive. Our final strategy consisted of getting the two hackers
on either side of the jail.