 |
RobotAlthough in the beginning all the teams were expected to use the skiff board, given the chance we switched to the Handy Board because of its stability.Our robot went through many transformations. Because we knew we would be collecting blocks, we built a shoot on the front that would funnel blocks to the sorting mechanism. It was just wide enough to pick up blocks 8 inches apart. |
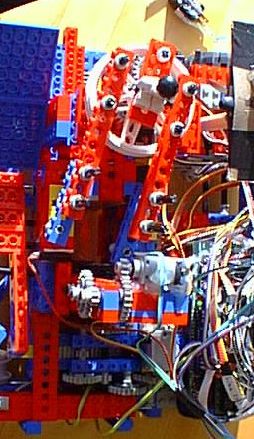 |
At first we wanted to keep the blocks on the ground and drag them along with us, but because of cracks in the game tables, that was not possible, so we designed a lifting mechanism. The blocks are sensed and then squashed between a servo-operated door and a conveyor belt which lifts them up. Once at the top, a mechanism similar to a revolving door puts the blocks in the correct bins depending on their color. The sorter is also operated by a servo. The sorter was pretty accurate, though sometimes two blocks were jammed into the conveyor belt, causing blockage. |
 |
Only one of the bins needed to be dumped (the one holding the professors and students). To open it we connected a bar to a gear train. When the bar was rolled back, the bottom of the bin would fall out.
|