Team 46:
Hot Stuff
People
Ben Chambers: Course 6-2 Junior
Madhulika Jain: Course 6-3,7 Senior
Niko Matsakis Course 6-2 Junior
Contest Table Summary
The
Contest Table (detailed description) for this year represented
the MIT campus, with Mass Ave in between and East and West Campus on
each side. The two robots playing against each other started out in
their respective campuses in the jail area. They were then expected to
put as many hackers in their jail and get as many students as possible
on their campus. There are also four professors in the middle of Mass
Ave that count for points if put on one's campus.
Strategy
Our strategy was to sort the hackers and students on our campus and possess
the hackers in our robot. We then emptied our hackers into our jail
before the round was over. The location of two hackers (one on either
side of the jail) was always known, and we aimed to pick both of these up.
Our robot also picked up the four hackers on our campus, whose position was
not fully known at the start of each round. It left the students on
our campus unmolested.
Our robot, Hot Stuff, recognized hackers by trying to poke a skewer
through the middle of the block. If the skewer went through it meant
that the block was a hacker, if it didnt, then it meant that the
block was a student. This is because students had no holes drilled
in them while hackers did.
We did not go for the professors at all. Had our construction and
design of our robot worked perfectly, we would have picked up a total
of 24 points (the result of putting six hackers in jail and leaving
six students on your campus) - This was twice what professor grabbers
got. Professor grabbing designs got a total of 12 points (3 per professor).
However, we had trouble with the construction and we could
not pick up all the hackers reliably each time, and in the end the
simpler designs which went for the known hackers and/or the professors,
but did not attempt to sort the unknown blocks did well in the contest.
Construction
There were two parts to our robot: the driving system, and the
block collection and sorting system. Our driving system was very simple:
We had two drive wheels in the back and two servo controlled steering
wheels in the front. We used car type steering and line following to
navigate the board. This proved to work extremely well for us. When
our line following sensors sensed that we were straying too far right or
left of a line our servos just pointed in the right direction and
steered us back until the sensors were happy. We recommend this system
to anyone taking 6.270 in the future. The code was easy to write, and
the system was reliable, and did not suffer from the problems associated
with castors, or dead reckoning.
The second part of our system was the block collection and sorting system.
We used conveyor belts to suck up the blocks. If the block got
sucked all the way onto the spoke then we knew it was a hacker, if
it did not then we knew it was a student. We had a touch sensor in
the inner conveyor belt to detect the student and a break beam sensor
near the spoke to detect the hacker. The spoke was mounted on an
elevator. If a hacker was detected then the elevator rose and
deposited the hacker onto the second level of the robot onto a
hacker storage conveyor belt. This is where our hackers were stored
until we reached the jail at the end of the round. At the jail,
we opened a gate at the end of our hacker storage belt, and ran
the belt to eject the students out into the jail.
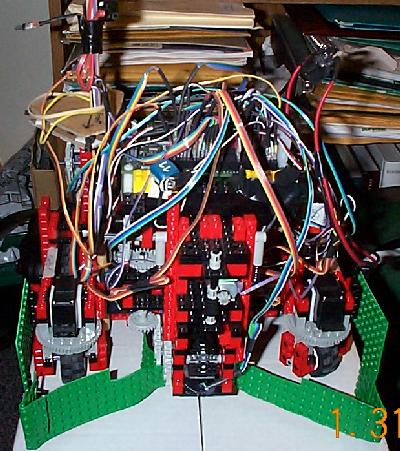
Pictures of the different parts of our robot are shown below -
The first picture shows a view from the bottom. We can see the
wheels, and the conveyor belts used for grabbing the blocks.
The second picture shows a top view - we can see the elevator and
the hacker storage belt.
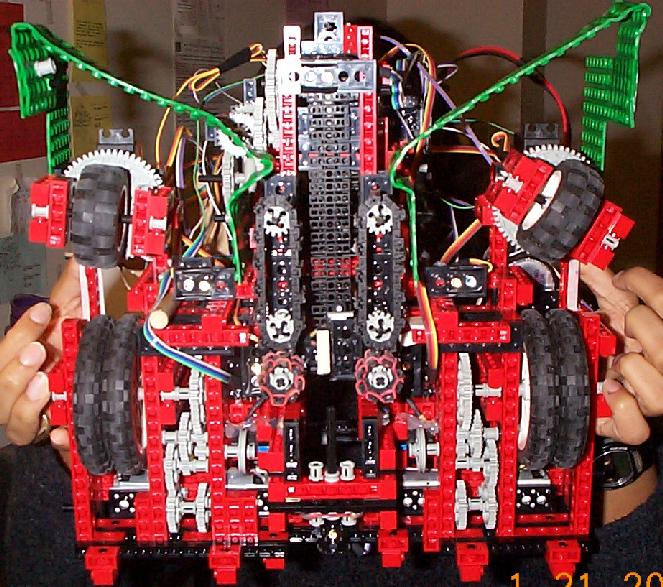
Photo Credits:
Thanks to Nathan Mahn for letting us use his digital camera to
photograph Hot Stuff. Special thanks also to Rachel Bredemeier
from the EECS dept for the photograph of the three of us in lab.