Welcome to Team 55 - Time Bomb!!
This page thrown together quickly by Melissa, so any personal thoughts
or crazy comments are mine :).
People have been pointing at me in the hallways & saying "Time
Bomb, that's you, right?!?!"...so yes, this is us.
This page is basically a screen dump of pictures with comments and
explanations, so don't expect too much.
I was going to also include our team log, but it's not very interesting,
so I'll just leave that out.
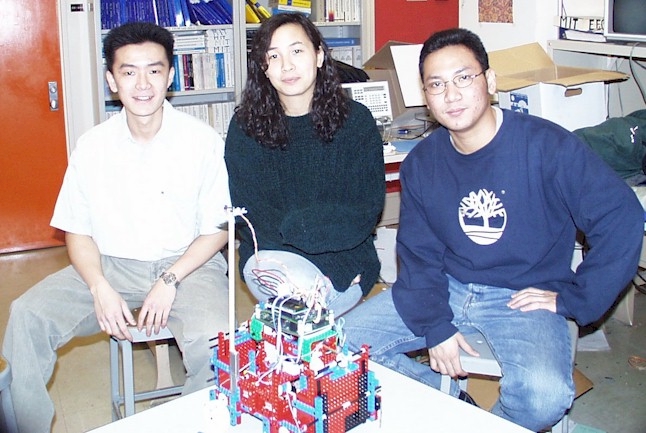
Team 55 Picture (from left to right) Eko Lisuwandi, Melissa Miao, and
Rachman Kaimuddin...and of course Time Bomb, the tempermental robot, below
us.
Eko has your typical Asian hair cut, Melissa is making a funny expression
and Rachman is attempting to be Mr. Cool.
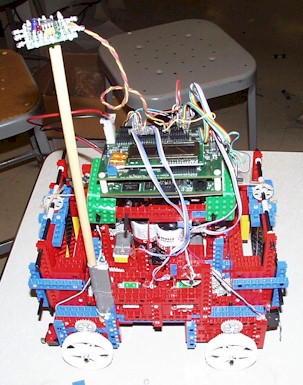
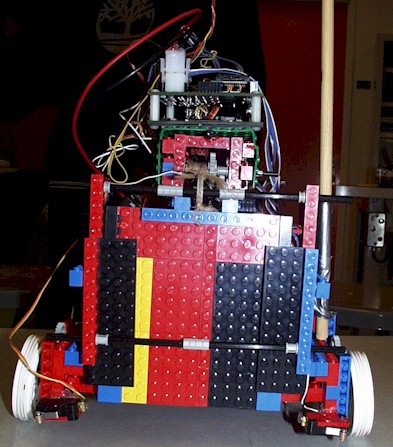
On your left is a side view of the Time Bomb, on your right is a closer
angled view. Our robot moves with four wheel drive...four wheels,
four gear trains, four motors. If you're wondering why it's so bulky...well
we spent a great deal of time bracing it. The controller board it
sitting on top, under a mess of wires. Ribbon wire is sooooooo pretty!!
It's fun to peel into individual wires as well! Light sensors are
located on each side of the robot - front, back, left and right.
In both pictures, if you look carefully to the right of the green lego
plate that is located on the left, there is a black tube that sticks out.
That black tube is made up of a sensor with shrink wrap around it.
The shrink wrap blocks out the surrounding light.
 This is another side
view, in case you haven't seen enough.
This is another side
view, in case you haven't seen enough.
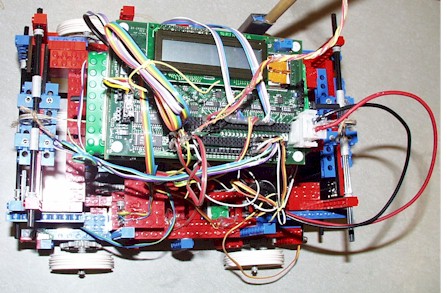
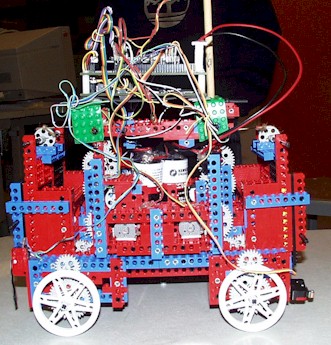
This is a top view. Some of the ribbon wire has been tied together
to create less chaos around the top of the controller board. The
huge red and black wires that are floating off of the left side of the
robot are connected to the battery pack that is located beneath the controller
board. Time Bomb is predominantly red, as you can see. We did
not choose the colors, so please don't blame us for that. We would
have preferred a predominantly blue robot. The wheels do not have
rubber encasing...this is because rubber caused more friction than the
robot could handle. The robot is so heavy that the rubber would drag
along the table when
Time Bomb tried to turn and ran really slowly in all directions.
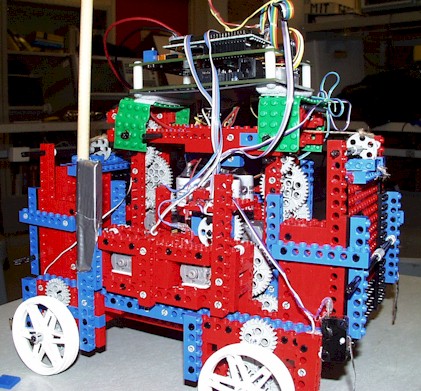
This is the back, I think. It's either the back or the front,
I don't know which...my partners take pride in the fact that the robot
is entirely symmetrical. The truth is, in the end, it wasn't, but
they're still in denial, so we'll just let that be. If you question
them enough times, they'll tell you the truth. As in other pictures,
you can see the controller board on top, the pole (on which the top is
mounted an IR (infrared) beacon), and the wheels. You can now see
that there are two bars of black with little grey pieces in between.
Those bars are holding a trap door. The trap door is connected to
a pulley system that allows the trap door to move up and down. Next
to the wheels, there are sensors on the insides. There is a black
one on the left and a red one on the right. They are actually identical
sensors, but one was mounted upside down so that they rolling part of the
sensors would be nearest to the wheels.
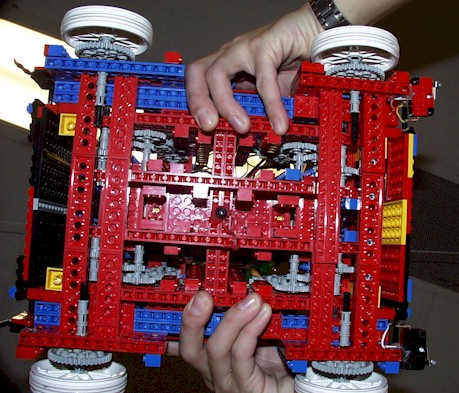
Finally, this is a picture of the bottom of our robot. Pretty
cool, huh? No mess of wires, looks like pure lego.
The colors of the sensors match well with the robot, so they are not
so noticeable in pictures.
Well, that pretty much concludes the tour of our robot. Thanks
for visiting. Bye bye!