
|
|
|
|
|
|
Strategy
1. Orient
2. Go forward to top
of hill
3. Extend arms
4. Backup, dragging
all 4 profs. onto campus
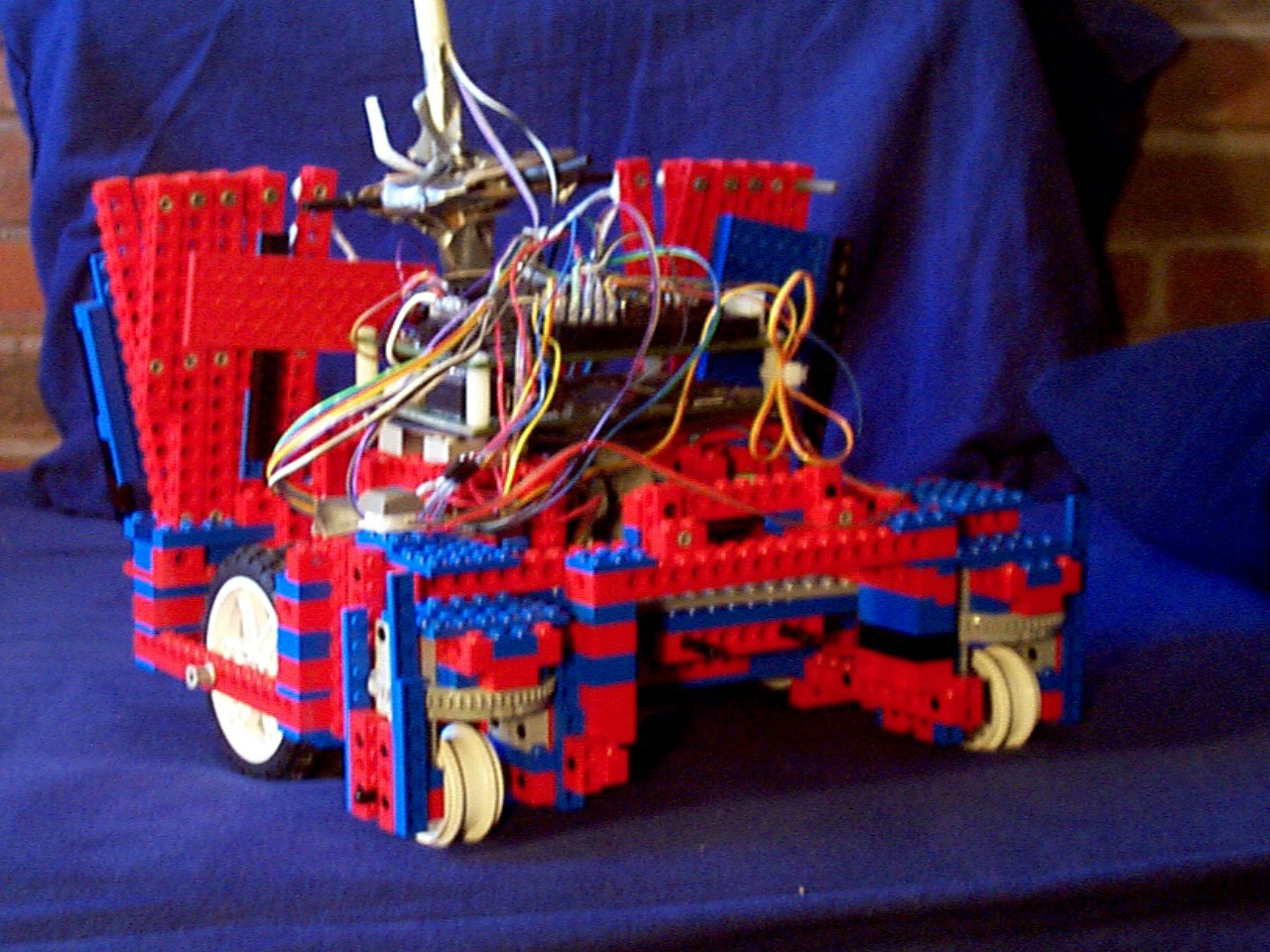
Design
The robot was designed
to do one thing and do it well. We succeeded on the first count.
We chose a differential
steering system because it was simplest and allowed the robot to rotate
in place. Differential drive sends varying amounts of power to each
wheel's motors depending on shaft encoder feedback. The code
provided for differentialDrive was...um...not reliable. The robot
snaked rather than driving straight, so we resorted to making each wheel
rotate a fixed number of ticks based upon the board dimensions. This
worked with some degree of replicability.
Results
The robot succeeded
in test trials but, on the day of the contest, overshot the point at which
it was to spread its arms and reverse. We speculate this might be
due to overcharging the batteries the night before the contest.
Us
 |
 |
 |
| Ryan Bender, course 6 senior | Oguz Silhatar, course 6 senior | "LegoMan" the lego man. (there are many like it but this one is ours) |
More pictures
|
|
Sadly it was ignored. |
 |
 |