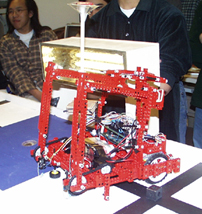
This is our robot. There are many like it, but this one is ours. Our robot is our best friend. It is our life. We must master it as we must master our lives.
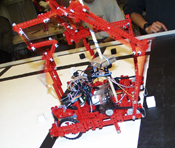
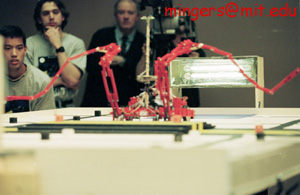
King Louie attempts to grab all four professors in the final round
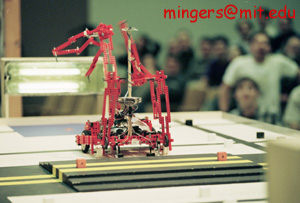
A child spectator looks at King Louie after it clinches the 6.270 title

|
each block |
On your campus |
In your possession |
In your jail |
Off your campus |
|
student |
+1 |
-1 |
-3 |
0 |
|
hacker |
-1 |
+1 |
+3 |
0 |
|
professor |
+3 |
-3 |
-9 |
0 |
King Louie performed almost flawlessly in competition, placing first overall and winning every time except the first match in the final head-to-head showdown. In that match, King Louie overturned to the right when it tried to orient itself. Because of this overturn, the robot was displaced too far to the left after it backed up against the wall to align itself. As a result, the arms fell in the wrong position, causing it to miss several professor blocks. Nonetheless, King Louie came through and won 6.270 by scoring 12 points in the next two matches.
Here is a summary of the results from competition:
Our strategy was simple: quickly grab all four professors by driving to the center of the board, releasing the robot's arms, and dragging the blocks back to our side. We realized it would be difficult to drive a car up the steps in the center of the board, so we designed two arms that could reach the professors from below. As it turns out, avoiding the steps made it possible for our strategy to work consistently.
We first created arms that could grab the top two professors reliably. To grab the other two professors, we simply attached more Lego to the end of our arm and developed a mechanism to release the arms and place them in the correct position on the table. Figure 1 shows King Louie's strategy.
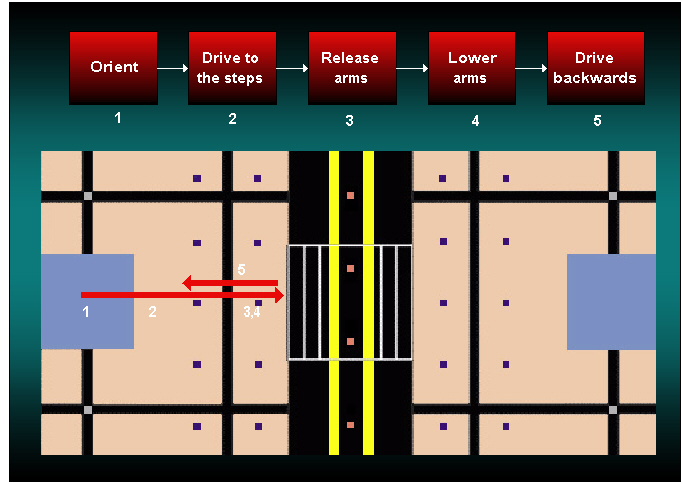
Figure 1. King Louie's strategy. First, the robot would orient itself and then drive to the steps. When it reached the steps, it would release and lower the arms in front of the professor blocks. Then, it would drive backwards, sliding the blocks back onto its side. If everything worked, this strategy yielded 12 points (3 per professor).
Like many other groups, we had originally intended to put the two hackers on the side in jail. Soon, however, we realized the professors posed the greatest threat because another robot could place them in our jail for -9 points. In retrospect, getting a professor in the opponent's jail proved too risky and difficult. Robots that tried to do this usually ended up pushing a professor onto the other team's campus. The placebo robot won many games this way.
Given that our robot could grab all four professors every time, the other team would be forced to sort hackers and students in order to beat us. If another team could do this consistently, we would gladly let them win. Sorting blocks is a complex task because so many things have to go right for it to work. For a "sorter" robot to beat our strategy, it would have to flawlessly move along the board, scoop and sort blocks, return to its jail, and release the blocks. We were skeptical that we could get all that working in a short period of time.
 |
 |
 |
 |
 |
 |
 |
 |
King Louie determined which way it was oriented by finding the strongest light source. For example, if the front light sensor showed the highest light reading, then we could conclude that our robot faced backwards. Judging the orientating simply by using strongest reading worked well because the sensors were well-shielded from ambient light. The sensor that faced the back light a registered a much higher light reading than the other sensors.
Once the robot obtained its orientation, it turned in a small radius by powering the left and right wheels in opposite directions. We set thresholds on shaft encoders placed on the back wheels to determine how much the car should turn for 90 and 180-degree turns. To make accurate turns, we found that we had to set thresholds for each wheel independently. To correct for any errors in the turn, King Louie backed up and aligned itself against the wall before moving forward to the steps.
We used shaft encoders to measure the approximate distance it would take to reach the steps. Once King Louie approached the steps, it would slow down to prevent the robot from bouncing back. Bump sensors in the front signaled the robot to stop completely. Once in position, our robot lowered its arms to surround the professors and drove in reverse.
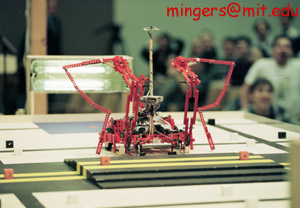
The arms had rubber bands that were used to fold the arms and naturally force the arms to spring outwards. Once folded, the left arm was placed underneath the right one. A horizontal axle, placed at the back of the robot, precariously supported both arms and prevented them from springing outward. When the two servos rotated, the arms would move forward and slide past the axle. Once the arms were far enough forward, they would spring outward.
 |
 |
 |
 |
 |
 |
 |
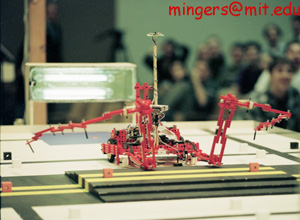 |
Figure 2 illustrates the different stages in the folding. In the starting position, the horizontal axle prevents the arms from unfolding. In the attack position, the servos move forward and hold the front part of the arms at 90-degree angles, allowing the arms to unfold. Finally, the arms are lowered completely when the servos rotate to180-degrees.
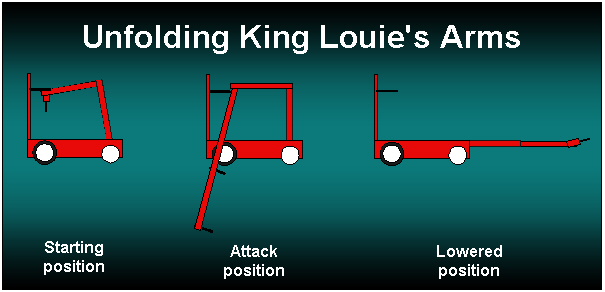
In the contest, the unfolding occurred in the following sequence of actions:
The arms may look clumsy, but they work well for good reasons. Since the sections that extend across the width of the table are connected by free axles, the arms "mold" to the shape of the steps. Axles that protrude from the edges of the arms trap any blocks that might slide away. And when the arms are held at 90-degree angles, they are placed in a position where forcing them downward produces the "L" shape that surrounds the professors.
We spent several days just focusing on improving the consistency in our robot. We knew King Louie didn't always get four professors; sometimes, the arms caught the back of the table or fell on the wrong spot of the table. Since all of our points depended on perfect execution, we ran over a hundred tests on our robot in the period of several days.
We found that if the axle that kept the arms folded were too short, the arms would prematurely spring out when the car backed up into the wall. Since the arms were so long, the momentum of the robot caused by moving forward would make the arms fly backwards. Often, the arms would catch the back wall and cause the robot to veer off to the side. To prevent the arms from releasing too early, we used a longer axle to support the arms. With the longer axle, the arms remained folded even after the robot slammed into the back wall.
We also discovered that if the rubber bands did not provide enough tension, the arms would fail to open fast enough to clear the dowel. We were careful to use several strong rubber bands, just in case one snapped during competition.
For the final contest, we also delayed the release of the arms until the car reached the steps. This ensured that the arms cleared the back wall at the expense of time. It also made our robot look less chaotic and dramatic. However, we were willing to sacrifice all this for consistency.
King Louie won 6.270 largely because it could consistently score 12 points, and it could do this when most other robots were barely operational. Luckily, none of the robots that King Louie faced drove to the middle of the table and attempted a similar strategy, which might have disrupted its ability to score points. We were also lucky to have a reliable RoboSkiff controller board and discover how to construct and unfold the long arms.
We also succeeded because we started early and worked quickly. When we received our controller board less than a week before the competition, the chassis was built, the gearboxes and motors were fully tested, and the arms had been created. While many groups were soldering and installing motors, our robot could reliably start and orient using its sensors. After the second day of having the controller board, King Louie could grab two professors reliably. On the third day, it could grab all four, albeit very inconsistently. Over the remaining days, we made King Louie consistent. With a relatively simple strategy, extensive testing and tweaking, and some ingenuity on our part, King Louie proved more reliable than any other robot in the competition.

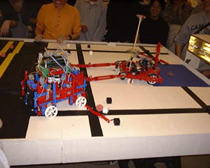
Team 6 takes first place after a nerve-racking 2-1 showdown in the final round