 |
 |
Bird's eye view of the robot |
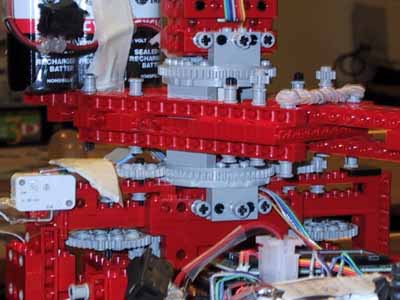
The turret and gearbox of the robot |
|
|
Bird's eye view of the robot |
The turret and gearbox of the robot |
The information our robot needed from the environment is whether the arm is spinning or stopped against an obstacle. We first used a breakbeam sensor to detect rotation of a pulley in the gearbox, but due to different lighting in 26-100 this sensor failed to detect rotation so the arm thought it was perpetually lodged against an opponent. The following day the breakbeam sensor was replaced by two mechanical switches that are pressed twice each time the arm completes one rotation. To hell with fancy optical sensors, we said.
If the robot did decide it was stuck against an obstacle, we wrote code that would stop the arm from going forward, rotate it backwards for a half turn, and then try to go forwards again. We hoped this would create a nice battering effect on opponents.
 |
The final product |
Mock Contest: We scored a double win in the first round of the mock contest (3-3, they stole one ball and knocked the other into the neutral zone while we collected all three balls off the pedestal), but we were eliminated in the second round when we faced a robot with a car that drove onto the pedestal.
Round 1: We faced off against team 10. Unfortunately, due to the different lighting conditions in 26-100 our optical breakbeam sensor failed to record the rotation of the pulley, so our robot went forwards for 3/4 seconds and then back for 1/2 second, for 60 seconds. It nearly tore itself apart. Team 10 collected the first ball off the pedestal and stole one of our balls, while we collected the remaining two balls in the middle for a final score of 4-3. The following day, The Tech described the match:
"Team 12's masochistic robot used its arm to hit the balls onto it's own side. However, the uncontrollable flailing motion was so powerful that the robot began to lose pieces of its arm with each whipping motion."
Round 2: A stroke of good luck pitted us against a team we could handle, team 7. They failed to orient correctly so we won easily with a score of 5-2.
Round 3: More bad luck for us as we are matched up against team 42, D.P. Team 42 mopped the floor with our arm robot. It was very very mean, and it stole all our balls. Bastard. Final score, 7-0. Note that team 42 was probably one of the best 5 robots and, according to the TAs, had the best code of any of the robots int he competition. D.P. was later taken out by team 10.