
Original Strategy
Our robot is going to start on an elevated platform that will be the same height as the center platform. We are going to have a rover that will have an umbilical that will be connected to our platform. The battery will be attached to the rover, while the handy board will be attached to the platform. The main reason for this was to minimize the amount of loose wires on our robot. When the light sensor is activated, using the IR beason, our platform will rotate into a position facing the center. We want our robot to rush the center ball and knock it to our side with an arm attached to a servo, that will be on the front of our rover. Our rover will then occupy the center position for the remainder of the round. The balls release at 20 and 40 seconds will fall on top of our rover which will have a slanted roof. These balls will hit the roof and roll onto our side.
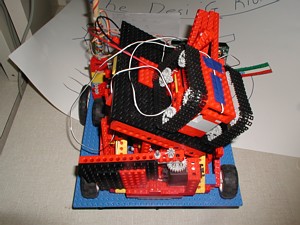
Left: Top View of Robot
Right: Side view
Finalized Strategy
After seeing a few robots in the mock competition steal multiple balls from their opponents side, we realized that in order to win we would have to somehow block our opponent's robot from being able to get back to their side. Our side of the board was already blocked with our platform, so we had figure out how to block their side of the board. We came up with a few ideas, such as having a arm stretch out from our car to block the path, but we finally settled for a mini car which would ride out from our car. It was difficult to think of a design for a car that could come off of our main car, because we already had a servo on the front of the car, and a roof on top of it. The mini car was designed similar to many toy cars that can drive upside down. This was because when the mini car drives off the roof of the main car, since it is coming off a high height and a slanted position, it usually turns upside down. The way it was designed, it would continue to drive forward, regardless off the orientation. The mini car was connected to the main car with an umbilical cord, similar to the one used to connect the main car to the platform.
Mechanical Aspect
Our robot consists of 3 elements. A platform to orientate itself, a car on top of the platform, and a rover on top of the car. The structure of the platform consists of 2 big wheels in the back and a third big wheel in the back center. The platform rotates about this axis. A medium sized wheel with a gear train of 75 to 1 is located in the front center and turns the platform. On the back of our platform we have an extra mount which is used to hold up the motherboard and the beacon.
The car is two wheel drive, with the back two wheels consisting of gear trains of a 45 to 1 ratio. Our battery pack sits on top of our gear box. It acts as the primary support for our slanted roof. In the front of our car is a servo with a few plates attached to it. This arm is used to knock the first ball to our side. In the back of the car is an umbilical cord which connects to the platform.
On the top of the car's roof is our little rover. The purpose of the rover is to delpoy itself and block the opposing team's robot. We had a slight problem in deploying the rover so that it would fall straight and right-side-up consistently. However, we solved the problem by building a rover which is in the form of a cube with two sets of tank treads running around a whole side of the cube. This way the no matter how the rover falls off the roof it will always land and drive forward. The rover is also connected to the car by an umbilical cord.
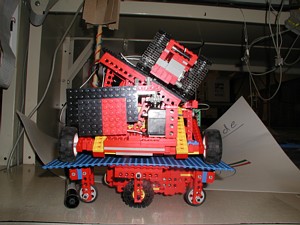
Front View of Robot