We went for the simple design of a box. We figured that this design would work because often times people would carry things in boxes, such as the 6.270 robot.
Our first attempt was to use wood, a stronger model of the cardboard box. After building a full sized model of our robot, we noticed that the 6.270 kit came with lego pieces.
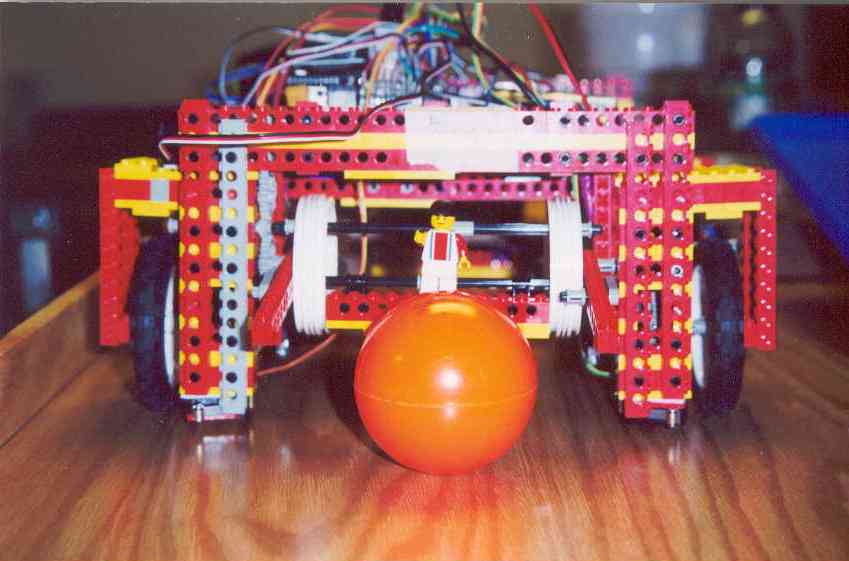
After building the box out of legos, we noticed that it had trouble collecting balls. Trisha, the only member of our team with the qualities of stability, knowledge, and reason (she was very tired when we named our robot), suggested adding wheels. After a close vote, democracy won out with 3 votes in favor of her proposal. The first attempt at mobility failed. After hours of puzzling over what could be the problem with the robot, we finally figured out that our box could not overcome the frictional force. After changing the gear ratio from 8:1 to 45:1, the box could finally move.
Since the box had four sides and we were quite fond of them, we decided to name them Front, Rear, Right and Left. Since Front and Rear were pointed in the direction of motion, we added pushers and gates to the front and back in a symmetrical fashion. Although it might seem like we were too lazy to think of something clever, this simple design was the product of deep thought and careful consideration. You are still dubious? Then consider the chain of events that led to our happy robot:
1. Our robot used differential steering since the center had to be hollow for the balls to be collected or passed through.
2. Friction slowed us down again in our attempts to turn, but we discovered that stripping the rubber treads from the rear wheels of the robot allowed it to slide quite nicely.
3. This fortuitious discovery had its cost, for it made our robot's 180 degree turn very unreliable.
4. We fixed this problem by slapping identical pushers and gates to the Front and Rear of our robot, making them indistinguishable.
The result of all this careful engineering led to this simple design and thus avoidance of any 180 degree turn. Please take a moment to appreciate the symmetry.

Intro Strategy Design Results Credits