Team 37 presents
Ninjas are cool, and by cool we mean
totally sweet, and
by totally sweet we mean totally cool.
Bob for short.
6.270 Home |
Competition |
Robot |
Strategy |
Problems |
Results |
Tidbits |
Advice
Team members:
- Dave "I heat shrink wrapped my finger" Simmons
- Rahul "I need a groidlet" Agrawal
- Debbie "I slept on 3 lab stools" Wan
Team nickname:
Drive Train:
- 1:27 gear ratio, double driven
Special Features:
- The Totally Sweet Totally Cool Spinning Ninja Karate Chop
|

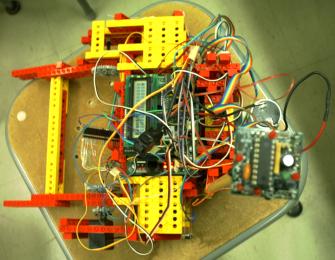
Team 37 at impounding.
Yeah, we know, we look horrible.
|
6.270
Top
The Lego Autonomous Robot Design Competition, known to MIT students
as 6.270, is held every IAP (Independent Activities
Period) at MIT. Using only Legos for the structure and gear trains, and
a HandyBoard (tm) to control the robot, each team of 2-3 students works for
4 weeks to create a robot that is fully autonomous and can compete against
other robots to score the most points in a competition round.
This year's competition theme was "Chicken." There were two holes on each
side of the contest table, each hole leading to a scoring tube. Points are
earned when the robots put balls into the tube, where "the nth ball in the
tube earns n points" (Mouser, 2002).
The Robot
Top
"Ninjas are cool, and by cool we mean totally sweet, and by totally sweet
we mean totally cool, Bob for short" was the result of 4 weeks of planning,
building, and destruction, including 6 days of sleepless
nights, 40+ hour "days" in lab, a drive to New Hampshire and a trip to
Mattapan.
Our team built 4 fully functional robots plus 2.5 half robots before we
finally settled on Ninja Bob's design. We first tried a 4 wheel differential
drive design, with each side driven by 3 motors. Not only did our batteries
drain after 30 seconds of use, but the robot was so powerful it tipped over
when it tried to stop or turn. Our next design was to cut the drive train
down to only 2 motors per side. However, we still were running out of power
after about 45 seconds. It was then that we decided to try a 3 wheel design,
with each drive train running on two motors. When we still had power drain
problems, we finally realized our motor driver chips were overheating. A
few heat sinks solved the problem.
After a few more structural changes, the final robot was born. Two front
wheels with a 1:27 gear ratio were each driven by two motors, and a third
undriven wheel in the rear allowed us to steer. The steering wheel was
attached to a servo motor, which provided for accurate turning. We also
designed an arm for the robot that collected balls. Basically it was a
three sided rectangle, with the fourth open side connected to the body of
the robot. Raising and lowering of the arm was controlled by a single
servo, avoiding problems of aligning the servos and having them work in
sync. The servo provided Ninja Bob with his characteristic Karate Chop
action.
The Strategy
Top
Twelve hours before Round 1, we still had not decided on a complete strategy.
Our goal from the start had been to make a fast robot. We knew speed was key.
We wanted to be able to effectively counter the teams that used hole blocking
as a strategy, so we knew we had to score quickly. Another key point for us
in thinking of a strategy was keeping it simple. We knew we couldn't count
on everything to work right every time, so the simpler the strategy, the
less chance for something to go wrong.

We decided the best way was to get the two balls nearest us into the trough
first. After START, we would orient ourselves away from the trough, use our
arm to trap a ball, do an about face, and drive straight towards the trough.
This would allow us to plow one ball in while also releasing the ball within
our arm. After we scored our two balls, we would proceed to the other side
of the table and wreak havoc upon the other team's balls. This was a counter
strategy to the slow but accurate robots that very often put 4 or 5 balls
into the trough every round.
At first we were worried about going over the limit for number of sensors
that could be used, but in the end, we used very few sensors. We had two
bumper sensors on the back of our robot that told us when we backed into
a wall. We also had 5 phototransistors and 2 cds cells used for orientation
and line following. We used a breakbeam sensor on each of our two drive
wheels as shaft encoders so that we could turn and drive straight.
The Problems
Top
One of the first problems our team encountered was power drain. The first
robot that we put together would only drive for about 30 seconds before
becoming interminably slow. When we used a different gear ratio and drive
train and got the same results, we decided the HandyBoard must be causing
the problem. After consulting a few organizers and TAs, we decided to
put heat sinks on the motor driver chips. This solved our problem. Basically
what had been happening was our motor driver chips would overheat and
shut off, cutting off current to our motors, and thus slowing them down
immensely.

Another major problem for us was building a smooth gearbox. With a 1:27
gear ratio and two motors, our gearbox contained no less than 4 axles,
4 24-tooth gears, and 3 8-tooth gears. It required careful adjustment
and spacing so that the gears and spacers would not get caught on each
other. After testing, the gears sometimes shifted and ground against
each other. Often, the motors would move just enough to cause the
gearbox to get stuck, but not enough for us to realize that it was loose.
30 minutes before our first qualifying round, our gearbox was completely
frozen. This was when we learned that the loose motors were causing
all the anguish.
Not only did finicky gearboxes give us problems with moving, but turning
was also a big issue. Almost 75% of the last week of working was spent
calibrating turns. Because we used shaft encoders to count wheel rotations
when turning, the sticky gearboxes often threw our calibrations off. The
right number of turns on a wheel sometimes just didn't go far enough when
the gearbox was tight. Also, we wanted to do turns at full speed, which
caused the momentum of the robot to be a big factor in turns. We learned
to power down the motors partway through the turn so that our momentum
didn't carry us farther after the turn stopped.
Driving straight is not as easy as it seems. We tried using shaft encoders
and line following to drive straight, and finally settled on using shaft
encoders. We also used the walls to assist us in aligning ourselves straight.
If we backed squarely into a wall, we knew we would be aligned straight even
if our turns had missed slightly.
Ninja Bob's arm had a tendency to get caught on the walls when we tried to
turn with a ball in our possession, but this was easily solved in two ways.
First, we raised the arm higher so it would clear the wall, and added
additional LEGO to the arm to prevent the ball from escaping. Secondly,
we added a timeout to the code, so that if Ninja Bob realized he had not
been moving for more than 5 seconds, he would turn himself slightly and
proceed forward again. This was our "Help me" routine. We also had a
"stuck in corner" timeout that allowed Ninja Bob to get himself out of a
corner if he stopped moving for 5 seconds. Ninja Bob often backed up so
fast that his back end would be slightly raised, preventing the rear
sensors from triggering a wall.
The Results
Top
Ninja Bob was undefeated through 5 rounds, and had consistently scored
two balls up to that point. In round 6, Ninja Bob missed a turn and
lost a ball, causing us to lose to a team that scored 2 balls. In round
7, Ninja Bob suddenly stopped calibrating correctly and read his start
orientation incorrectly. Luckily, we managed to back into a ball and
score one point, tying with the other team. By then we realized something
had gone seriously wrong and saw that our HandyBoard batteries had drained,
despite having been charged the night before. Ninja Bob was essentially
color blind. Between rounds 7 and 8, we tried to charge the HandyBoard, but
to no avail. In round 8, the organizers allowed us to keep the HandyBoard
on charge while we calibrated. While this allowed us to get somewhat decent
readings, it was a lost cause. At the moment we were to arm our robots,
Ninja Bob's heart stopped beating. Our HandyBoard had crashed. It was
a no start for us, and the 2nd loss in a double elimination tournament.
We were one of the top 8 teams out of 60, but we like to think we could've
won. Hey, let a ninja dream.
Tidbits
Top
|
Dave tried to heat shrink wrap his index finger. The heat gun was
too hot so he used a soldering iron instead.
Debbie and Dave played chicken on the Longfellow Bridge at 3 in the
morning, 14 hours before impounding.
Rahul learned to differentiate between male and female headers during
6.270.
Our team name was inspired by this
website.
|

|
Our Advice to Future Contestants
Not that you'll listen to us...
- Decide on one robot early and spend time to perfect it.
- Don't underestimate the time it takes to calibrate the sensors
on your robot. Once you start calibrating, you realize so many
mistakes that need to be corrected and so many cases that need to
be taken into account.
- Work in lab. It's fun to talk to the other contestants and
watch everyone's progress. It's also easier to debug in lab. The
TAs are really helpful!!
- Have fun!! Don't stress out about this. It's IAP.
- Keep it SIMPLE. We may have only gotten two balls, but because
we were able to get two balls accurately every single round, it
got us really far.
- Check out pasat contestants' websites and heed their advice.
You'll realize afterwards their value.
- Don't go to Mattapan. If you want to know about that little black
line between Ashmont and Mattapan (on the Red Line), just ask
us.
Top