Team #43 ROBOT MINI-ME
Our robot implements a put-some-balls-in strategy and then goes for the other robot trying to disrupt the strategies of the other
robot.
We used a combination of three motors, a servo, bump switches, IR beacon, phototransistors, LCD cells, distance sensors and
accelerometers and break-beam sensors in our robot.
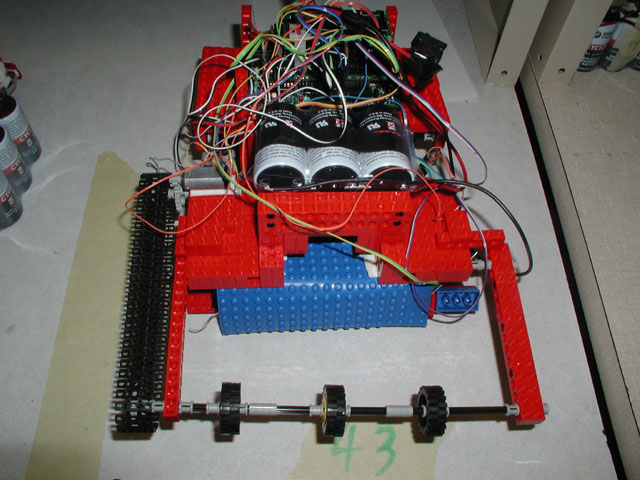
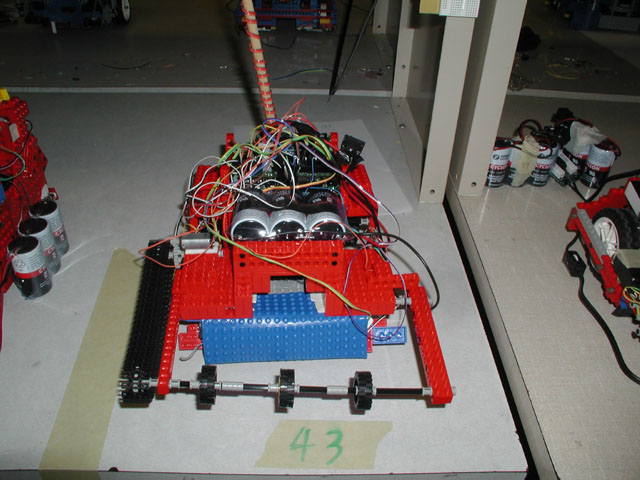
One prominent facet of our robot is the ball-sucking mechanism facilitated by two fly wheels which are powered by a high speed
motor used to suck in the balls
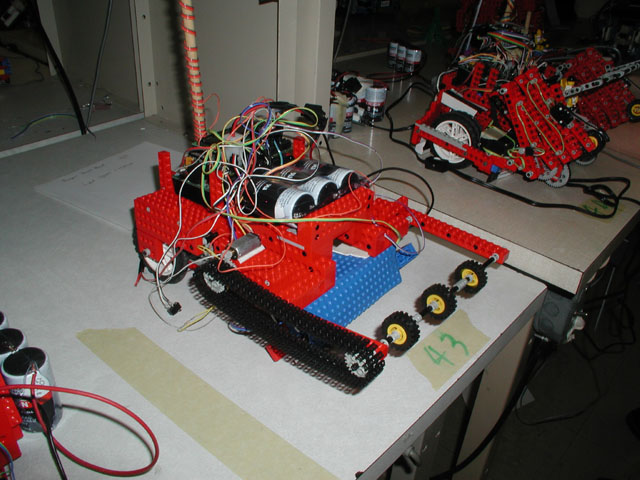
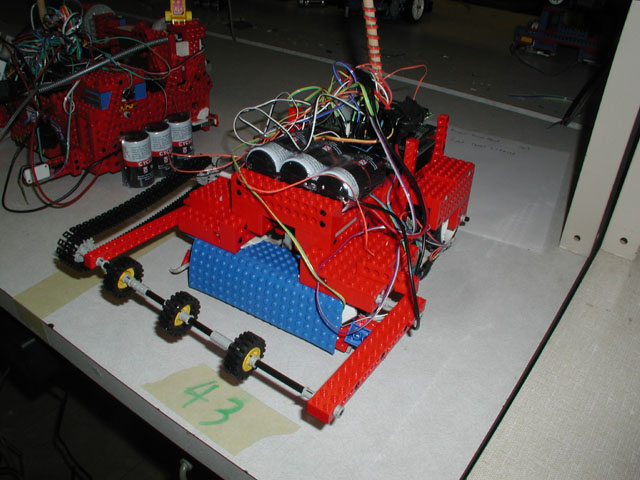
Here are some pics of our cool robot: