NICE RACK

Building the Robot...
 This is the beginning stage of one of our many robots.
This is the beginning stage of one of our many robots.
 Out of the seven robots we built, the only thing that didn't change was the gear ratios. Lucky 45.
Out of the seven robots we built, the only thing that didn't change was the gear ratios. Lucky 45.
 Almost to a working prototype...
Almost to a working prototype...
 Baby Robot
Baby Robot
 3 days before the first round...still trying to debug prototypes...
3 days before the first round...still trying to debug prototypes...
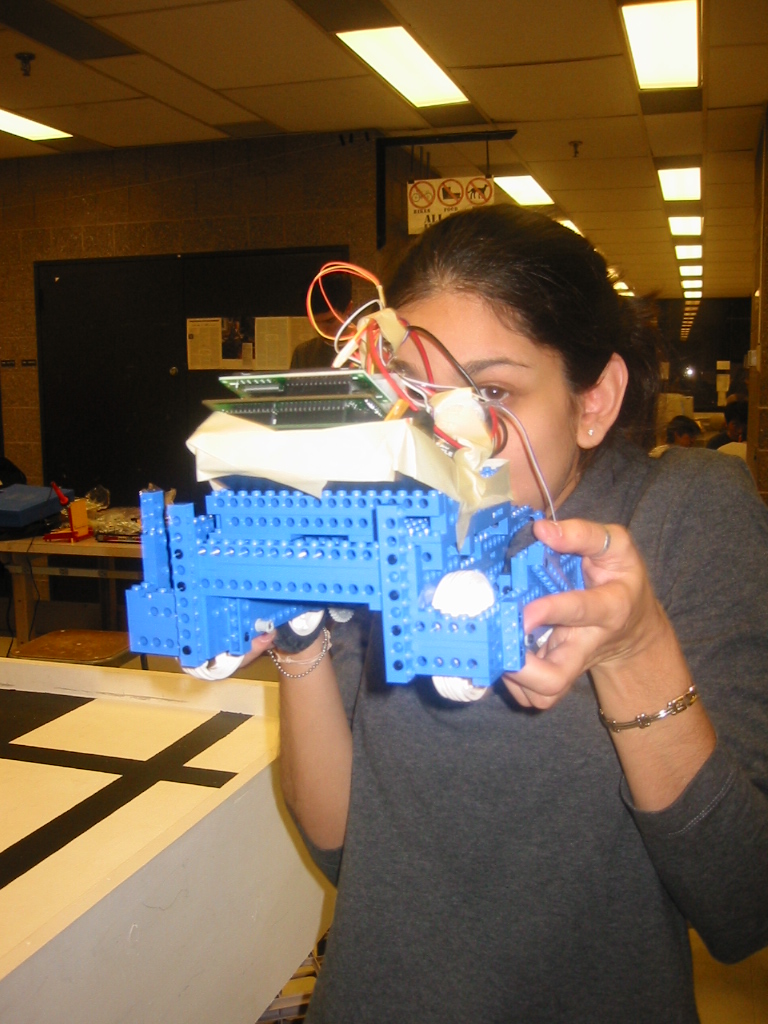
 Beauty Tip #49: Legos make great jewelry.
Beauty Tip #49: Legos make great jewelry.
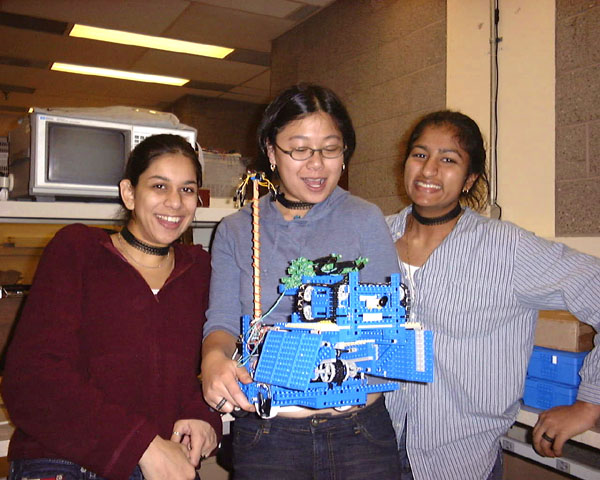 The Final Product.
The Final Product.
Javiti
(putting it out there)
The robot first oriented itself using 4 light sensors. It then knocked in the ball closest to the
trough. When the robot hit the lip of the trough, the rack of the robot passively extended over
the trough(conservation of momentum, baby). Then the baby robot resting on the rack zoomed off to
the other end. The gear ratio, 27, of the baby robot was critical in getting speed and power. It
moved with treads, so that it would zoom off to the other end no matter how it landed in the trough.
The umbilical cord of the baby robot was made of lego baseboard tether. After the baby robot was
deployed, the mother-bot spit out a little platfrom to block the hole closest to it. The platform
covered about three-fourths of the hole, and was effective even if it fell into the hole. It was
tethered to the mother-bot with lego chain, and it's deployment was initiated by a motor. The robot
was simple, elegant, and well braced (Bracing was and is Janette's bitch).