|
Timmy! |
||
|
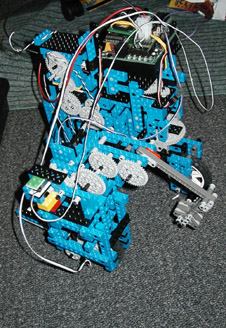
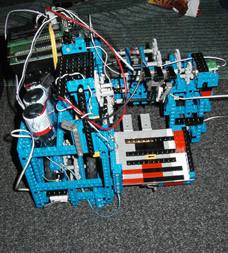
Design Timmy uses a combination of a hammer and claw to trap balls. A movable lift allows Timmy to drop a ball into the Lava Pit at the bottom of the contest table. Timmy's structure is designed around the lift, claw, and ramp. It uses a single motor with a 45 to 1 gear train to turn a set of wheels on the left side of the ball trapping equipment. In front of that axle is a servo-controlled steering wheel. A fourth wheel is mounted on the right side of the ball trapping equipment for balance. The hammer brings a ball into the robot by swinging down and pushing the ball onto the lift. The claw holds the ball on the lift until the robot is ready to drop the ball into the cup. The claw and the lift are raised simultaneously, dumping the ball into the cup. The hammer is moved by a motor with a 45 to 1 gear train. The claw and lift are moved by a servo. The claw is moved directly by the servo, while the lift is connected by a wire rope that is attached to a 5 to 12 gear train. One side of the bracing of the ramp is shorter than the other, causing the ramp to tip after it reaches a height of 2 inches. Strategy Timmy's strategy is to capture a single ball and drop it into the Lava Pit at the bottom of the table. We chose this strategy because, since a ball in the pit is worth 4 points, the other team would only be able to tie, and we would be guaranteed a win. Starting from either side of the table, Timmy moves up and grab a ball. If the ball is the correct color, Timmy moves to the cup and deposits it. If not, the claw is raised enough to allow the ball to move and the hammer is used to knock it loose. This not only gets rid of the ball, but will knock it hard enough to send it to the bottom of the table. Timmy continues to grab balls until the correct color is found. Timmy uses line following for most of its traveling, supplemented by shaft encoders on each side to ensure 90 degree turns. Two distance sensors are also required for approaching the pit from the black side of the table. Three touch sensors were also used. One is mounted on the claw to sense the presence of a ball, one is mounted on the back of the ramp to sense the lava pit, and the third is on the rear left of the robot, which when combined with the sensor on the ramp, allows Timmy to straighten out against a wall. |
|
|
|
|
||
|
|
||
 Timmy from the left |