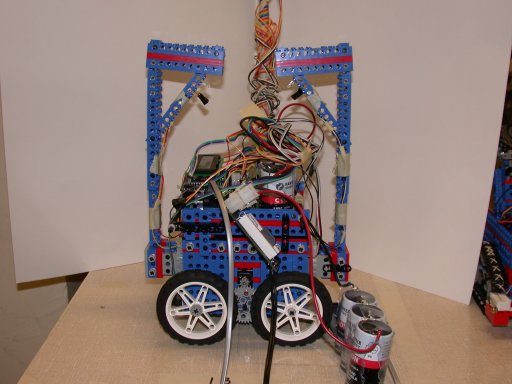
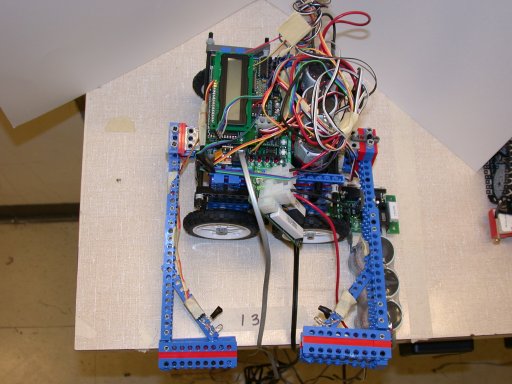
Our robot consists of one central body and two arms. The body contains four wheels driven by one motor capable of a single uphill/downhill motion. At each end of the frame is a distance sensor. Above the frame are two arms each controlled by a servo. The arms are capable of 90-degree movement in either direction. Mounted on each arm is a single light sensor for ball recognition.
Given the poor performance of other machines, we determined that the best strategy would be to reliably secure one point. Upon startup, the machine determines its playing side and moves uphill towards the balls. It uses a combination of the uphill distance sensor information and timeouts to stop at the first set of balls. It rotates the arms backward and determines the ball color. If the ball color is correct, then it returns to the flat playing surface. If not, it continues with the forward ball, and so on.