Akash Kansagra, Elvio Sadun, John Aquadro
Physical Design
Our robot is constructed on a three-wheeled base, arranged in a 'Y' pattern. The two rear wheels are independently driven by motors (geared down to generate quite a large torque). The front wheel is unpowered, but can be turned via a servo. By turning the front wheel sideways, we can drive the two rear wheels in opposite directions and turn the robot in place.
The collection mechanism on the Bob Hagopian Bot was unique among the robots in the contest. The primary implement is a claw mounted at the front of the robot. It is driven by a single motor. The claw is connected directly to a lever of sorts, connected to a gearbox by string. The lever allows the robot to lift the ball up and place it in the cup at the bottom of the table.
Strategy
Our guiding principle in devising a strategy was that a ball in the cup at the bottom of the table would win the round. The scoring system was such that, if a team were to place a ball of their color in the cup, the best the opposing robot could do was to tie the round, which would require it to pick up all four of its balls and take them to the center plateau. Based on the brevity of each round, we realized that this would be an impossible task. So, our entire strategy revolved around the ability fo move a ball from the top of the table to the cup at the bottom.
Upon receiving a start signal, our robot races to the opposite corner of the table and picks up a ball of our color (it determines color using the infrared transceiver mounted on the claw. If it detects that it is holding a ball of the opponent's color, it turns around and discards the ball. If it is holding a ball of its own color, it raises the claw and races down the table (along the taped lines) to the cup.
Results
In the first round (the qualifying round), we suffered a double loss. Our handyboard suffered from a "power glitch" that was later determined to be the result of a bug in the pcode-22 (supposedly corrected in pcode-hb). As a result, none of the sensors was turning on, and we were unresponsive to the start signal. Since the contest was based on double elimination, we had another chance.
In the second round, our robot was selected to start from the right side of the table. Due to time constraints, we had not properly tested the robot from that side of the table (we had spent most of the time testing it from the left side of the table, assuming that it would be relatively easy to reflect the motion to the other side). Sadly, although not unexpectedly, our robot didn't go in the right direction, and instead slammed into one of the walls without a ball. After it drove around a bit more, the round was called a double loss.
More Images
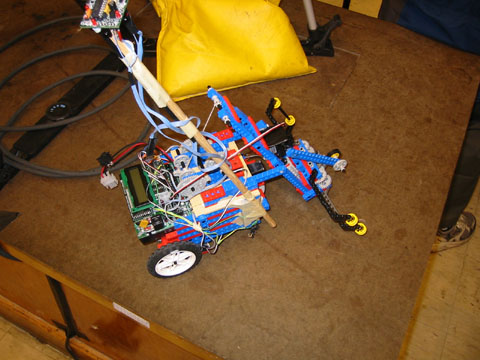
Side view of robot. Note the infrared beacon and mast. Also visible is the mechanism that lifts the claw.
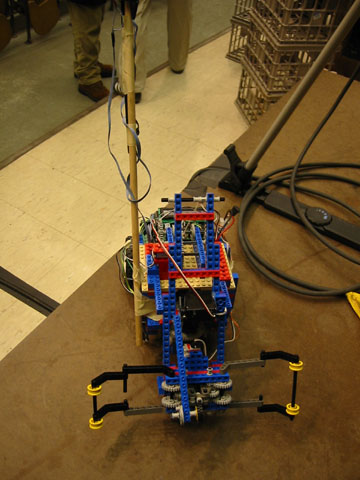
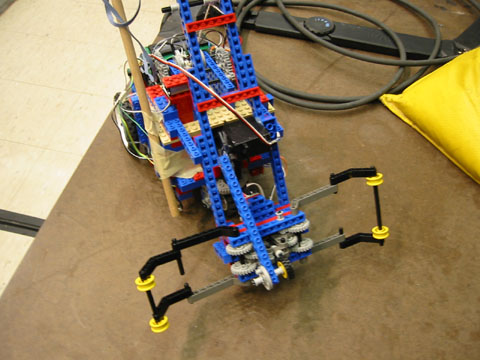
Front view. Note the gear assembly and servo mounts.
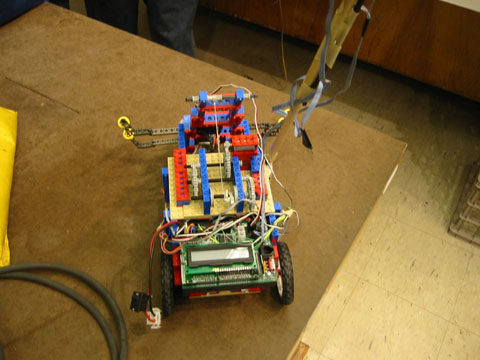
Rear view. Note the mouting of the handyboard. The lifting mechanism is also clearly visible.