Our initial strategy was to capture a ball from the same side of the board that our robot started out on, and line follow to the cup on the lower level of the board. After testing the robot that we built we decided to use less sophisticated strategy and attempt to capture one of the balls across from us and move it to the middle of the table. That seemed like a simple enough task for us to perfect.
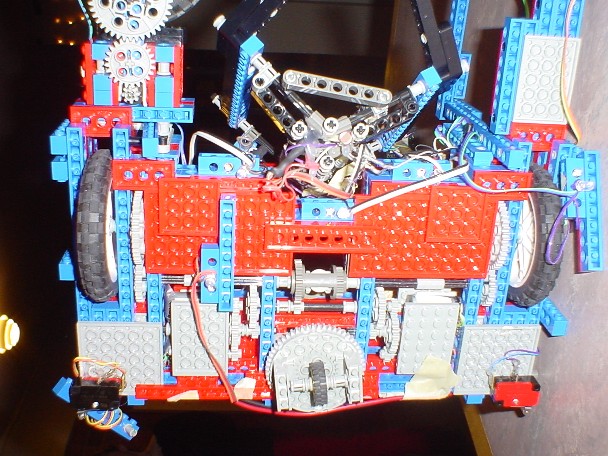
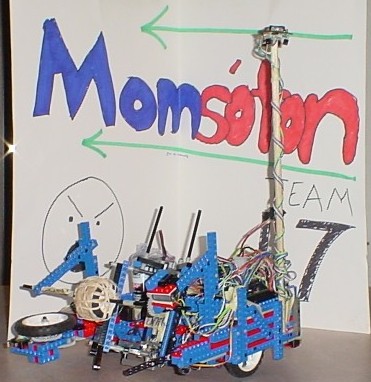
The design of Moms'oton followed one general rule: to use designs not recommended by the TAs and organizers. The robot itself consisted of three mechanical components. The drive train to provide the robot with mobility, a lift to pick up balls whenever the robot ran into them and a pair of wheel placed to force balls into the lift, which we affectionately called the chainsaw. The most rebellious design choice was to use a differential in our drive train, this was strongly advised against by our organizer, and in the end did give us some problems controlling our robot. In order to have some idea what it was doing our robot used two types of sensors: bump sensors and color sensors. We used four bump sensors on our robot, there were two bump sensors on the front of the robot and two on the back. The main purpose of these bump sensors was so that our robot could tell if it was bumping into a wall. The color sensors that we used were photo transistors paired with super-bright red LEDs. We used 6 of these color sensors, five on the bottom of the robot used to tell which part of the board we were on and the 6th was in the lift to tell which color of ball we had picked up. we also used a photoresistor to detect the start light.
With a little luck we managed to do pretty well in the competition. In the first round we won because the team we were paired against didn't start and was disqualified, thank you Dave Saylor's team. In the second round we managed to pick up a ball and return to the middle of the board and scored a point which was good enough for a win. In the third round we collided with the other robot at the beginning of the round and we got tangled up and not much happened from there, which ended up in a double loss. In the fourth round we lost again, because we got caught in the other robot's tether, but they went on to win the competition so it didn't hurt my feelings to much that they beat us.
This is our team, on the left is Justin "J the C" Cohen, in the middle is Beto Peliks and on the Right is Gary Escudero.
Beto, the looker in the middle, is single, enjoys romantic evenings and long walks on the beach, if interested email him at beto@mit.edu.