6.270 IAP 2003
Kartik Lamba & Glenn Tournier
ONE NUT WONDER!
Description:
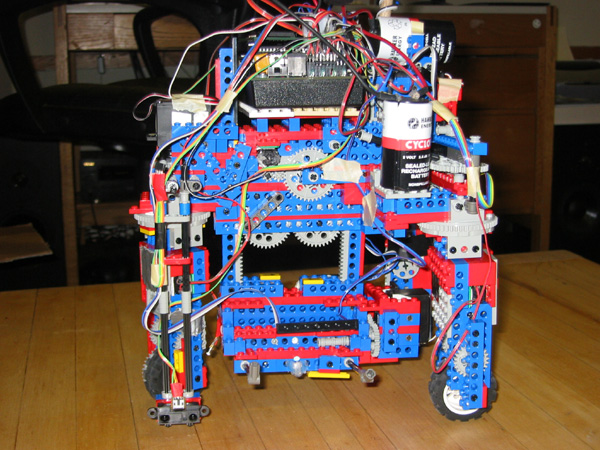
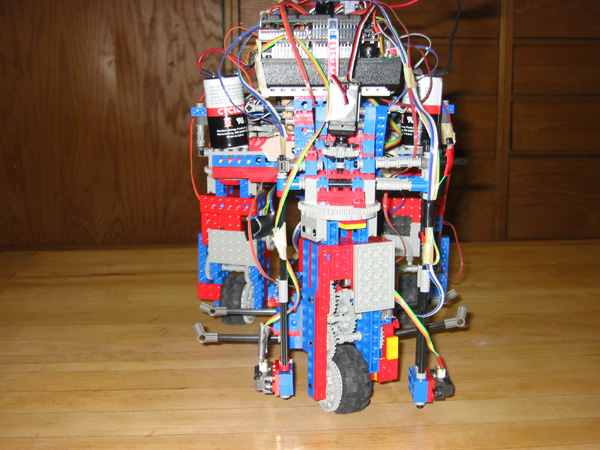
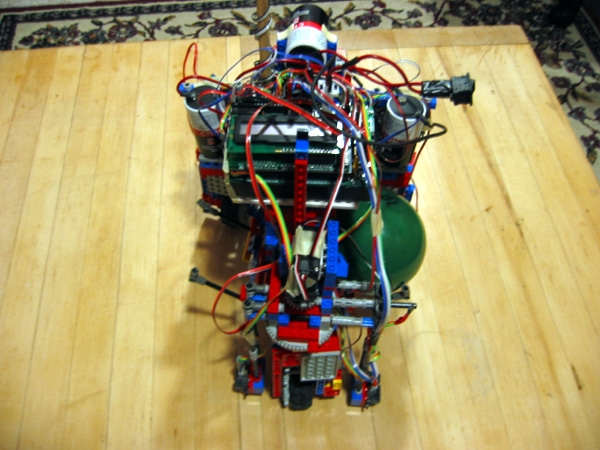
1. Drive Mechanism: We used a 3-wheeled synchro drive to move our robot around the playing field. This allowed us to move the robot without changing its orientation. This strategy did not require the robot to turn in place; however, it was necessary in the competition. Speed of the motors was accomplished with closed-loop feedback using breakbeam sensors. The front wheel was driven by a single motor and controlled using 1 servo. The rear two wheels were geared together and thus used only 1 servo to determine their direction but were driven by two separate motors.
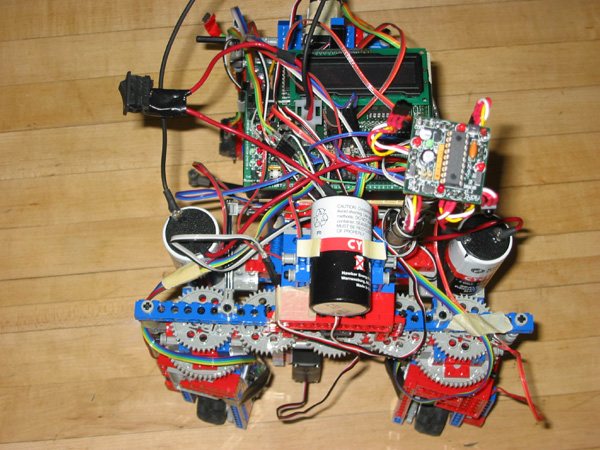
2. Forklift/Elevator: On both sides of the robot there is a forklift, which was used to capture, check the color, and contain or drop balls. The forklifts were connected to an elevator, which could raise a ball over 3 inches. In addition, the two "legs" of the forklift tilted backwards to contain the ball and forwards to drop it.
3. Environment Sensing: In order to maneuver around its environment, the robot used a combination of the closed-loop feedback system mentioned above and the Sharp distance sensors for wall-following. Avoiding collisions with the opposing robot is important, but scoring points was the primary objective so the infrared beacon was not used. In order to detect the color of a ball once it was captured, a LED-phototransistor pair was used to determine its color which were mounted inside the forklifts.
4. Scoring Strategy/Ball Retrieval: Our robot's strategy was to obtain a like-colored ball and deposit it into the island in the lava pit initially. However, the placing the ball in the cup became increasingly difficult and so the robot code was changed to pick up a single ball and drive to the middle level. Balls were retrieved in the following manner. The robot used its distance sensors to maintain a certain distance from the side-wall while traversing up the ramp to the nearest set of balls. It positioned itself in between the first two of the four balls. The robot picked up the one ball closest to the wall in the square of balls using a forklift and checked its color. If it was the correct color, the ball retrieval portion will be complete. It would then drive sideways to the center of the board and then to the middle level. If it was the opponent's color, it released the ball, sending it astray, and continues on to the other lower ball in the bottom square of balls and use the forklift on the other side. If this were also the incorrect color, it would drive to the other side of the table to disrupt the other robot.
Images:
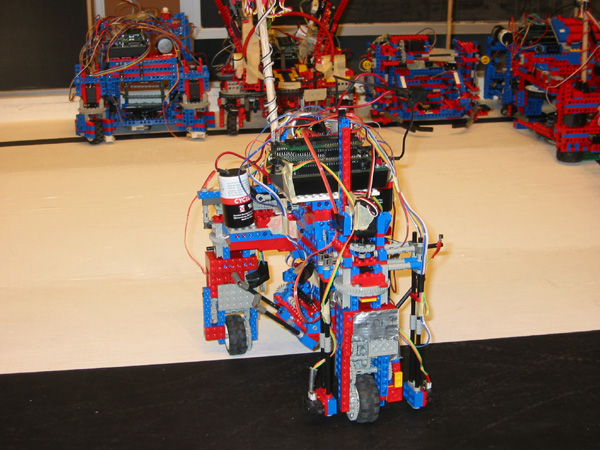
One Nut Wonder on the Playing Field
Rear View: Synchro Drive Gears
{kind=link}
{kind=link}
{kind=link}
{kind=link}