MIT 6.270 Autonomous Robot Design Competition - IAP 2003
Team 19
Alan Shields, Benny Richardson, and Kathy Chen
About the Competition
There are two sides, one painted in black the other in white. The robot has to figure out in the beginning which direction it stands in, which color it belongs to and then get going. Within 60 seconds it has to score as many points as possible. The balls in the middle plateau each count as one point, and one single ball in the cup, the so-called lava land counts as 4 points. Both team get to decide the ball arrangement of their opponent.
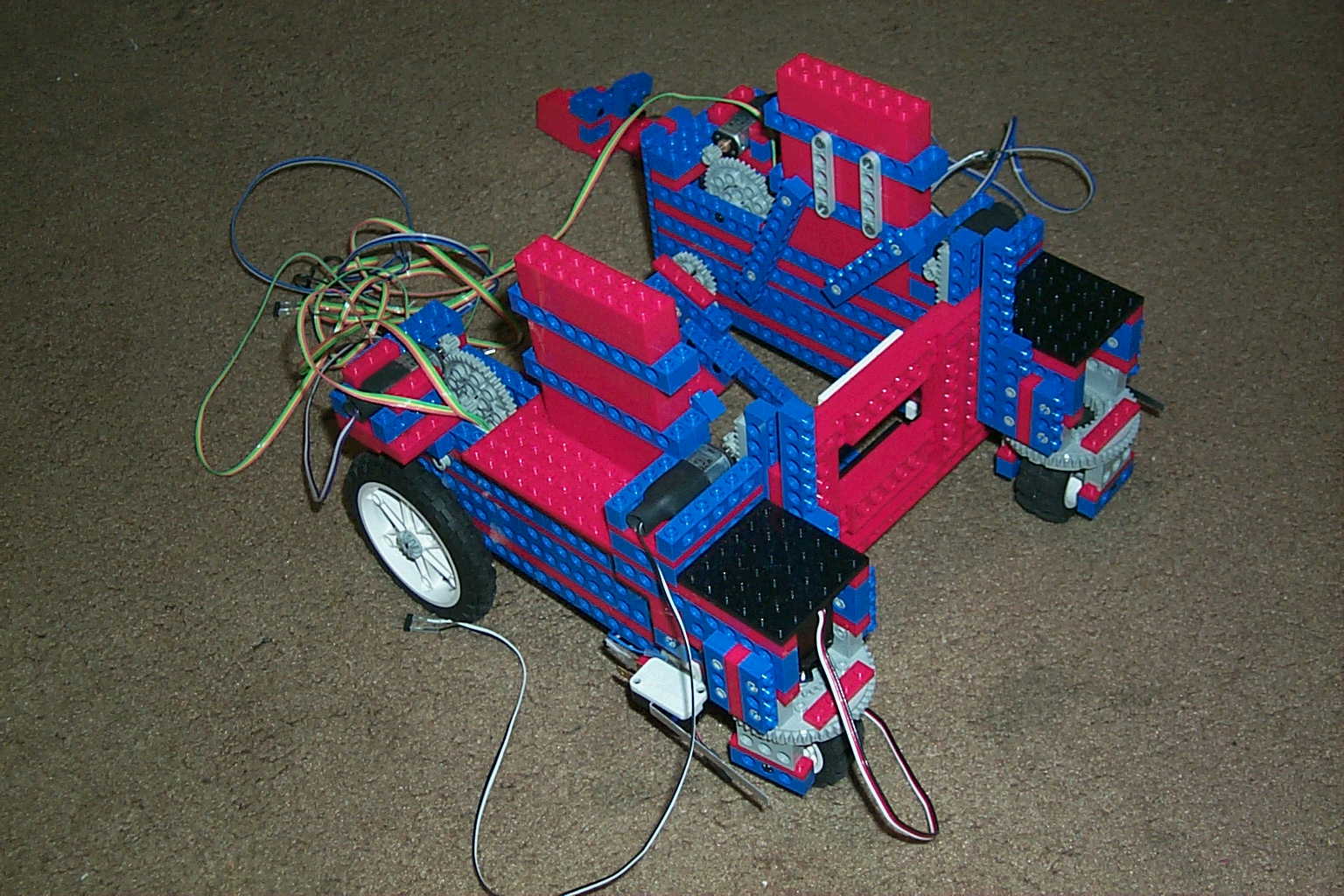
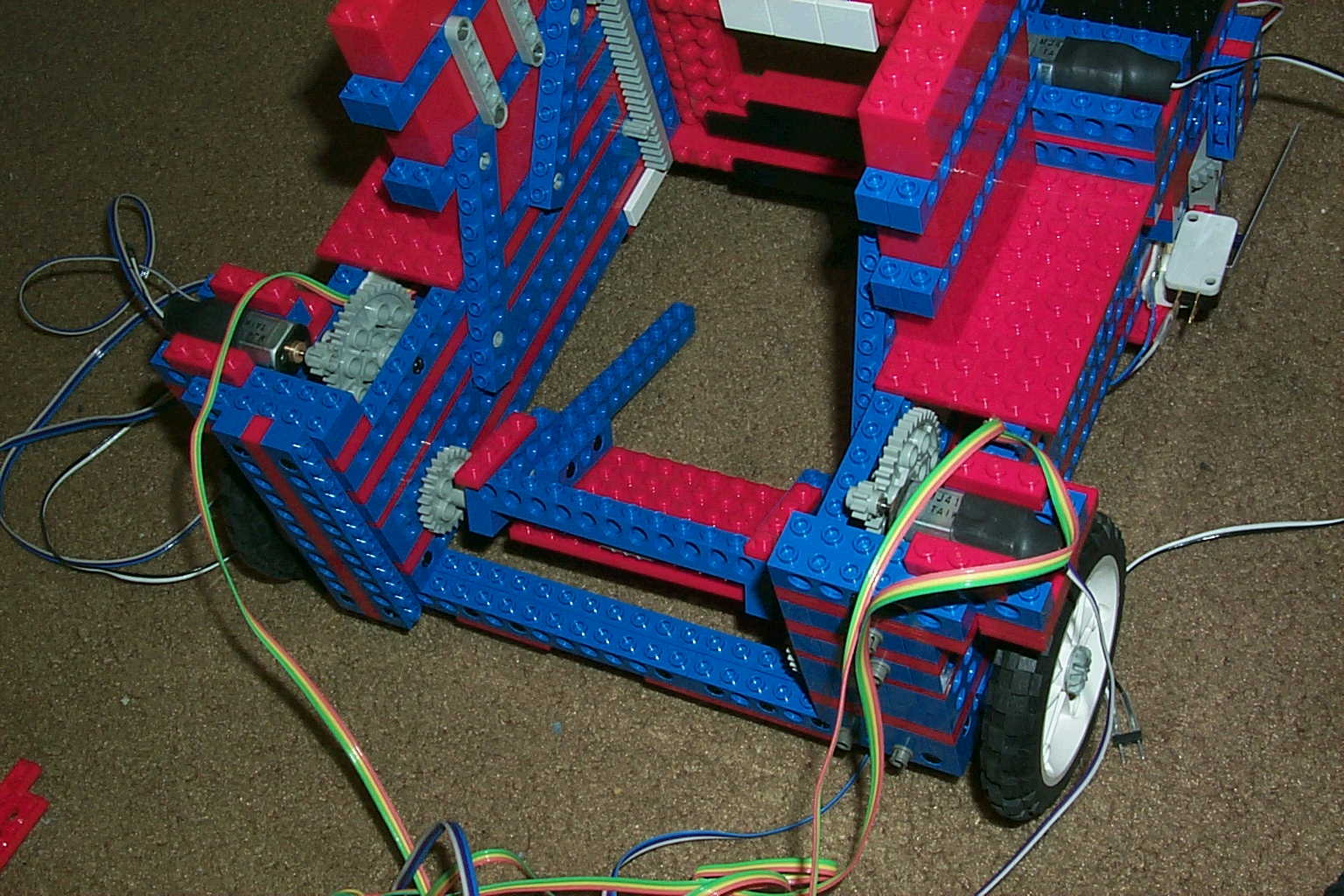
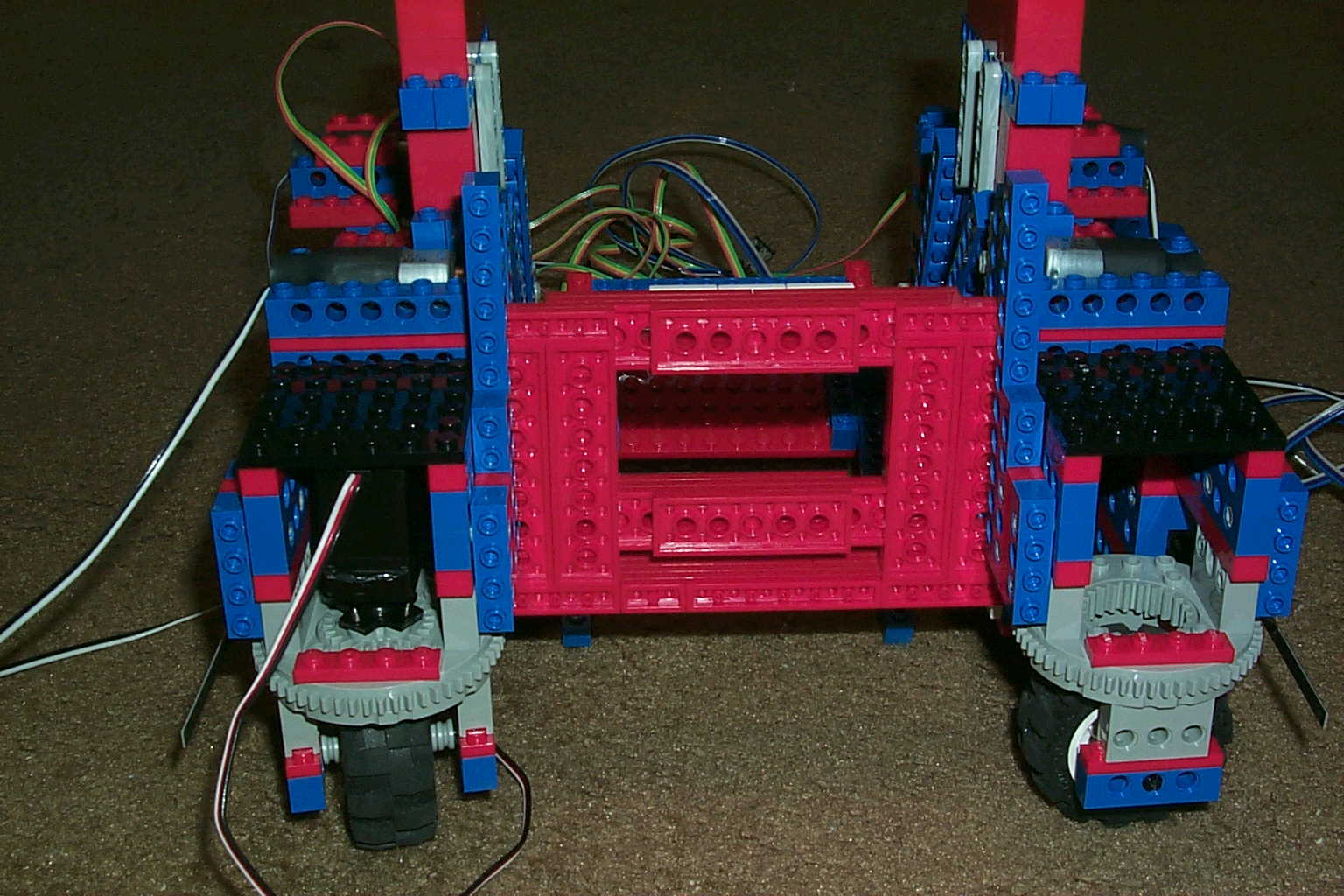
Our Robot
Our robot is powered by 2 motors on the rear wheels, and 2 servos for steering. The ratio for the gear box is (1:112.5), which focuses more on speed than torque. The servo on the back lifts up the ramp, which serves 2 purposes. If it is our ball, the robot will lift up the ball by about 45 degrees, then bring it to the lava land and proceed to drop it into the cup. If it is not our ball, then the robot will lift up the ramp by about 90 degrees and let the ball roll out from the rear direction. The stop gate also prevents the ball from rolling out from the front of the robot.
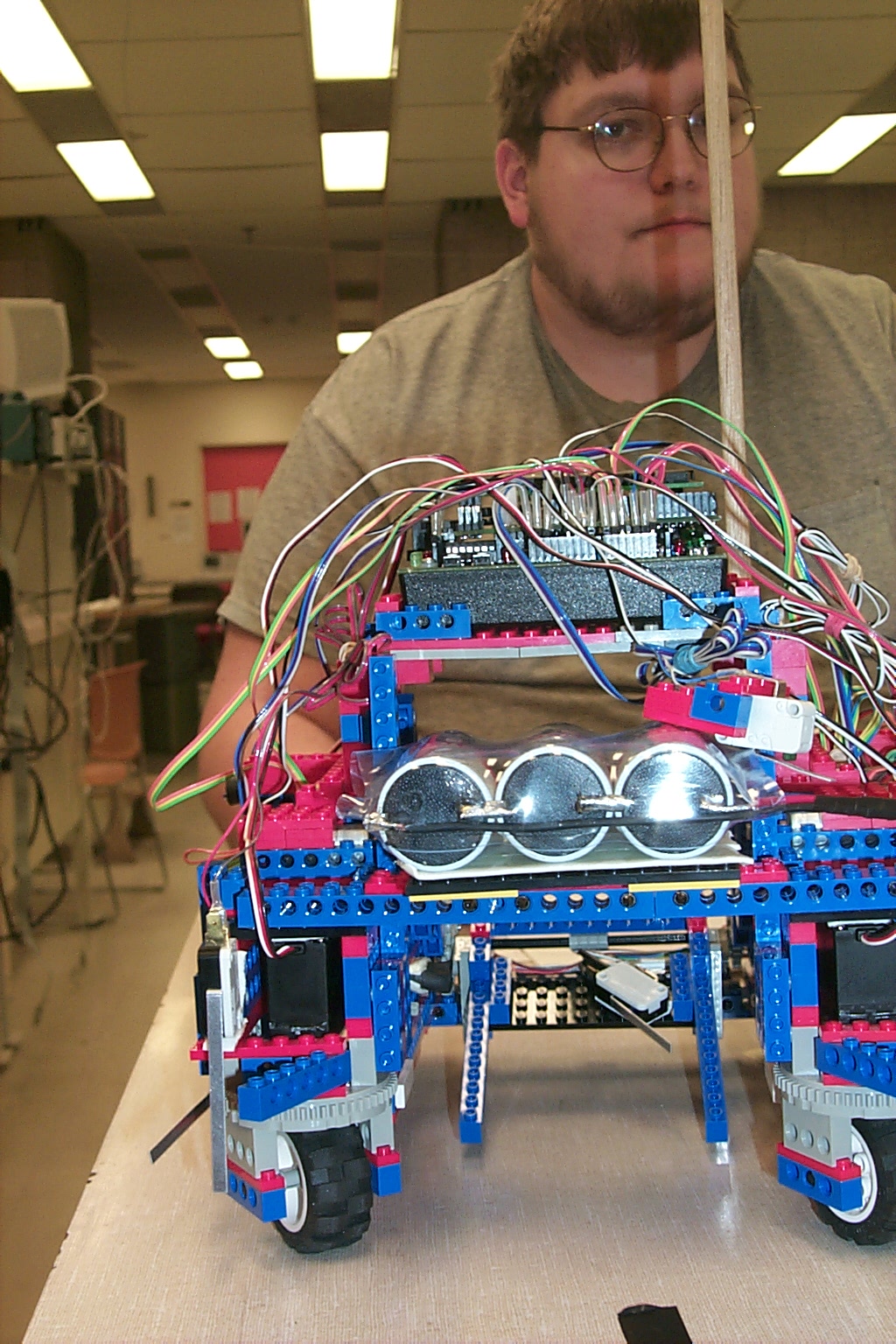
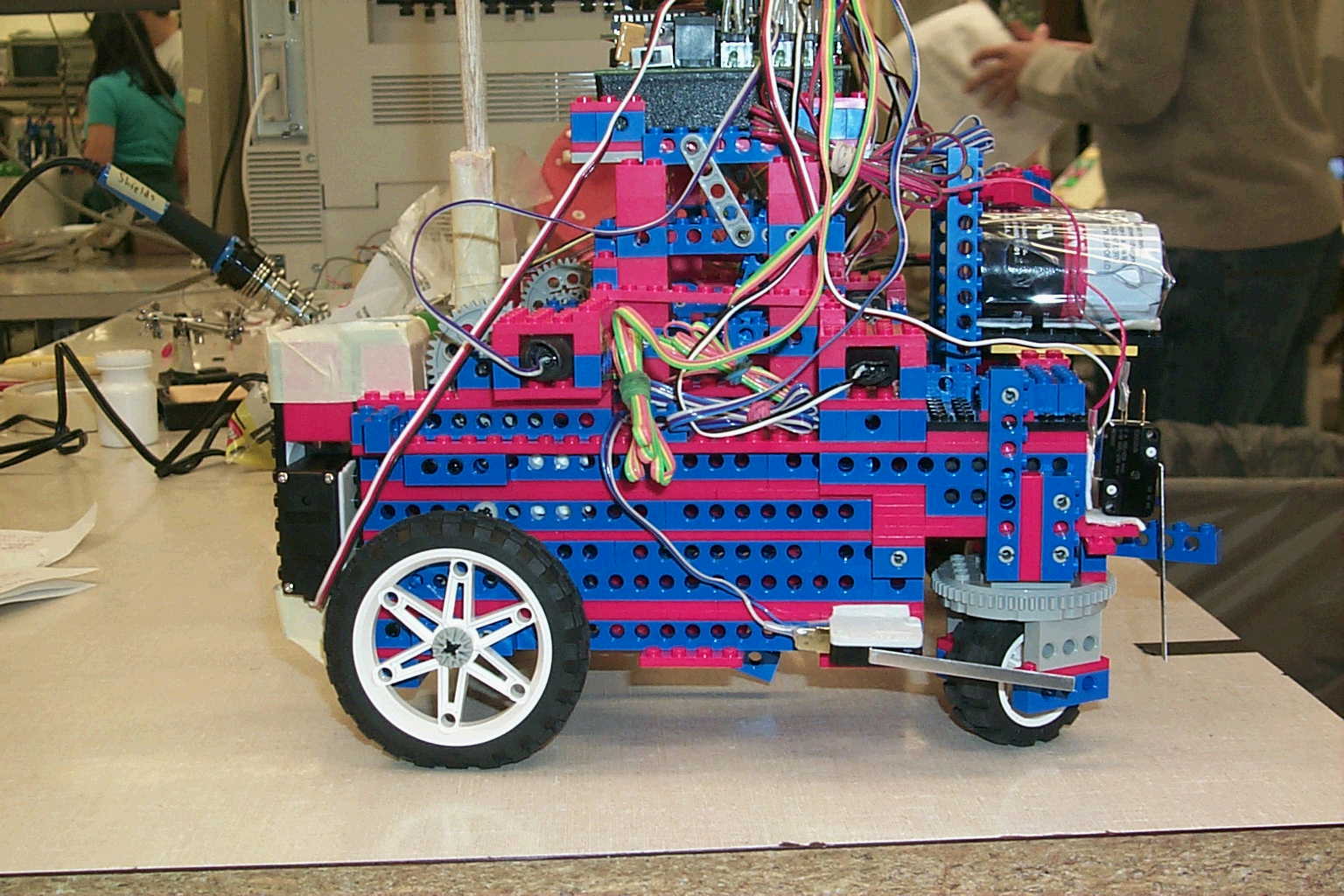
Our Strategy
Our strategy is to be the fastest possible robot to reach the lava land and successfully score 4 points. Using three color sensors located near the bottom of the robot, we figure out the correct orientation, and turn to face up the table to our balls. We then use wall following to move up towards the balls along the long side of the wall. As we reach them, the balls pass through an open area in the bottom of our robot, where they are color sensed. If a ball is not our color, we drop down a stop gate and let it roll out from the back using the ramp. If one of the first two balls is our color, we drop down a stop gate and move our robot towards the ball to push it onto the ramp. The ramp then rotates back up into the robot to trap the ball. Once the ball is trapped, the robot moves backward down the table to the lava pit, turns, and moves to the cup to deposit the ball in it using the previously mentioned ramp. Once the ball is in the cup, the body of the robot itself protects the ball from being removed by the enemy. If neither of the first two balls is our color, we turn and face the third ball lying along the wall, which is necessarily our color. Using the same mechanism as mentioned before, we trap this ball, and head to the center of the table in the same direction. Then we turn to the left and move down the table to the cup, depositing and protecting the ball as above.