IS - autonomous dual ended robot
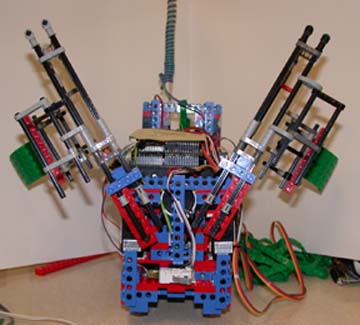
This IS our robot.
STRATEGY:
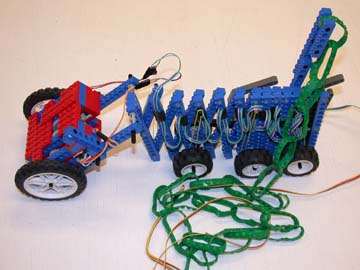
Our strategy in this contest was based heavily on the assumption that robots in general are stupid. Initially, we thought we should try to score in the cup. However, it soon became apparent that such a strategy would be entirely too easy to play defense against. Therefore, we took on the strategy that we would have 2 independent robots, connected simply by lego tether and wires. The main robot would go up the hill and collect balls, while the other robot would drive across the table, extending a fence geared towards blocking the opponents robot (and anything else) that tried to come down the hill. We figured that the other robot would be more likely to dump our balls down to the bottom than it's own. Thus our fence could very possibly score points for us as well.
THE ROBOT:
At first, we created a robot that would wall follow up the hill and "straddle" the balls using a sucker cleverly mounted on gravity driven hydrolics. However, because of the fact that the balls are only 1 inch from the wall and it was hard to make the robot turn away from the wall, we decided to scrap this model.....on the Saturday before the competition. So, there we were, having some beers in lab, waiting to be inspired for a new robot design. We finally decided to create a line following robot that would go up in between the balls, determine which ones were ours, grab those, and move back down to the scoring area. The other robot drove an extendo-fence on wheels across the playing field to block any robot/balls that would try to come down the hill.
THE CONTEST:
In the first round, we hardly had a working robot ready, so basically we just knocked around a few balls but didn't score. One of only 10 teams to qualify that day, we knew we still had a lot of work to do. And a lot of work we did. A few all nighters later, we had IS, the superbot. Well, it wasn't that super. Lighting problems in 26-100 made us score the other team's ball. And our robot fell over. Ah well, we did more than 90% of the other robots. So much for winning this thing. I blame it all on my partners.