6.270 Team
30
The
Team
Our team had three members:
· Shaun O'Neil (senior, course 2)
· Juan C. Reyes (senior, course 6)
· Sid Sen (senior, course 6)
Strategy
Our first strategy relied on simplicity and speed. The robot was going to turn 90 degrees towards the balls, go up the slope and get all of them at the same time. The sorting of the balls would be done in the middle plateau (after the robot had backed down the incline). There were two reasons why we thought this was a good idea. First of all, this would prevent our opponent from messing with the balls on our side of the table. In addition, we planned on getting to the middle plateau as fast as possible so that we could shoot out a barrier that would prevent our opponent from scoring in the lava cup (at the bottom center of the board).
The most attractive feature of this strategy was that is was very simple. If we created a robust robot, we would always score two points and our opponent could only score at most two points to tie the score. There are not that many things that a robot could do to prevent us from achieving our goal if we created a robot that was fast in collecting the balls and bringing them back to the middle plateau. The key was collecting all the balls at the same time in order to achieve the speed that we desired, and only doing the sorting in the middle plateau while our lava cup barrier was being shot out.
Planning and
Building
The mechanism that we were going to use to grab all of the balls was some kind of expanding claw at the front of the robot. The robot would then have a rotating wheel that would suck the balls inside the robot where the LED/phototransistor sensor was placed to determine if the ball was white or green. If the ball was the color that belonged to us, we would move it to a storage area inside the robot. On the other hand, if the ball did not belong to us then we would put it in a separate compartment where it would eventually be spit out.
The driving mechanism of the robot was going to consist of a motor controlling the two wheels in the back of the robot and a servo controlling the steering mechanism. The navigation of the robot would rely on wall following. As a result, we had to use around 7 touch sensors (two on the back, two in the right side, two on the left side, and one in front). We thought it would be better to use wall following rather than line following because we wanted to travel up and down the board as quickly as possible. Line following might be more robust, but we were more interested in speed.
After building for some days, we realized that we were going to face certain problems. The size of the balls did not allow us to build the robot we wanted while conforming to the size constraints for the robot that were imposed on us. The robot could be built but there was insufficient LEGO to reinforce it and make it strong enough to withstand attacks from the opponents. The extension barrier, in particular, required a lot of pieces because it had to reach diagonally from the middle plateau to the lava cup. For these reasons, we decided t simplify the design of the robot and change our strategy.
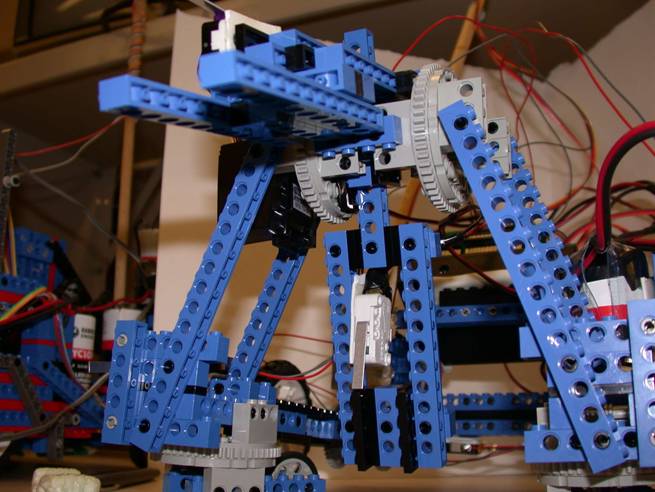
The new strategy just consisted of bumping into balls and using a paddle mechanism to allow in those that were our color and push away those that were not. The paddle mechanism would consist of a vertically-oriented revolving door that could rotate 180 degrees (using a servo); it would be fitted with a bumper sensor and an IR LED/phototransistor sensor to be able to find and collect our balls. The picture below shows the paddle-mechanism of our final robot:
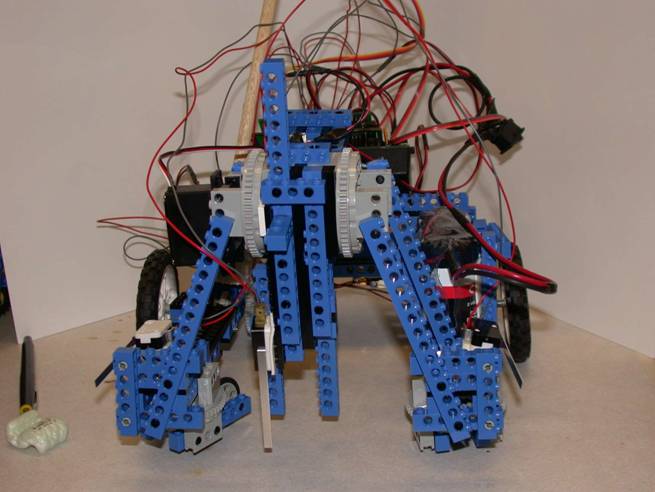
The drive mechanism of the robot consisted of two back wheels (driven by separate motors) and two wheels in the front to facilitate balance and rotation. The front wheels were allowed to swivel but were not controlled by any motor or servo (turns were achieved by spinning the back wheels in opposite directions). A better view of the wheels and the compartment of the robot for holding the balls (basically most of its interior) can be seen in the following picture:
Conclusions
Our initial robot design was not as simple as we had initially thought. Although our strategy was fairly simple, the constraints imposed on us (both in size and equipment) made it impossible to build a complete and reinforced robot as planned. The fact that it took us some time to realize this meant that we were unable to have enough time to come up with an alternate robot design that would work the way that we desired. Instead, we had to simplify our design significantly and slightly alter our strategy, which took a lot of additional work and time. Nevertheless, in the end we were able to construct a robot that had the ability to score points for us and that could do its job fairly quickly. Our late change in plans made it unrealistic to build an alternative mechanism for creating a barrier around the lava hole.
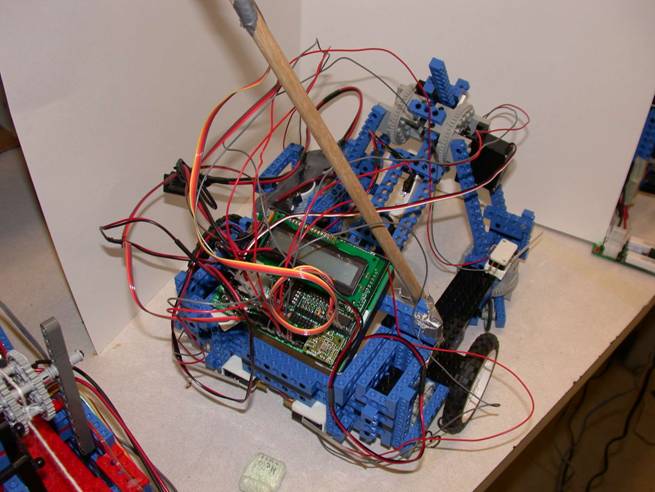
Here is a picture of our final robot in its impounding box:
In general, our team learned a lot in 6.270. We learned the value of simple strategies and their complex relationship with the designs of robots that can implement these strategies. In particular, we learned that these robots need not be simple themselves. With time and more experience, we will be able to come up with strategies and designs that balance each other out in terms of the complexity they require and impose on each other. We think our experience with 6.270 was a crucial step towards this understanding.