
Team #35
“Dog In A
Bathtub”
Team #35 is: Mark Brigham, Jason Mueller, and Eric Scarborough
Our robot
"Dog In A Bathtub" was primarily designed with simplicity in mind.
She was built on the principle that the most dependable devices are the least
complex. Any device, autonomous or not, depends on people to repair it, and
because we can't interfere with the robots during the competition, our first
priority was to make her tough with a minimal amount of complex mechanics.
Another problem
which has plagued some 6.270 contestants in the past is the lack of ability to
drive through obstacles created by other robots. To account for this, we
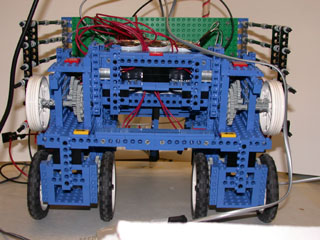
designed "Dog In A Bathtub" with all the power she could need. Four
drive wheels make sure to maintain enough contact with the ground for effective
traction while using four motors purely for driving power insures that we will
be able to muscle through the toughest of obstacles. Her steering is controlled
via the two servos, each of which is connected directly to one of the two front
wheels.
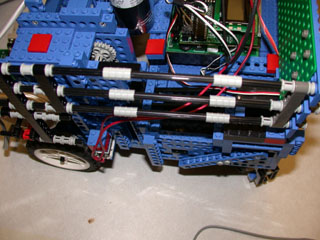
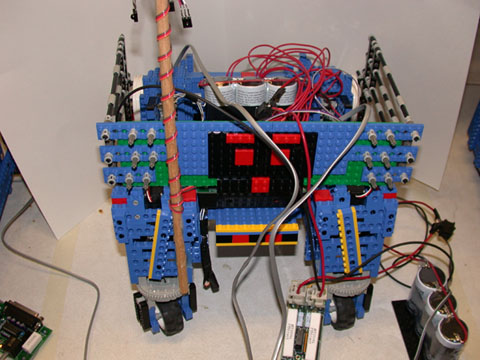
However, the
most unique feature of our robot is the aspect of its design that allows us to
drive over balls while collecting them in the rear. By minimizing the
mechanical complexity of the ball-capturing mechanism, we have made it more
dependable and, hopefully, faster than the more complicated models used by some
of the other competitors.