Our robot does some cool and unique stuff, but didn't work overall, so we didn't compete. Basically, we spent too much time on the cool and unique stuff, and not enough on the basics, with the result that once all the cool and unique stuff was added on, the basics didn't work right.
The most interesting aspect of our robot to posterity will no doubt be its "Radar", so you might want to skip all the other stuff and go directly to that section.
Find one of our balls on our side of the table and put it in the cup as quickly as possible.
All of our robot's systems work beautifully except for its drive systems. Unfortunately, we didn't spend enough time testing it under the full weight of the HandyBoard, batteries, and so on, and discovered in the last few days before impounding that it was unable to go forward in any sort of fashion that could be described as "straight". Wall following and line following techniques proved insufficient to compensate for the extreme failures of the drive system.
This section will be the most detailed, because it is the most interesting feature of our robot, and the system that future generations of 6.270 contestants are most likely to find useful.
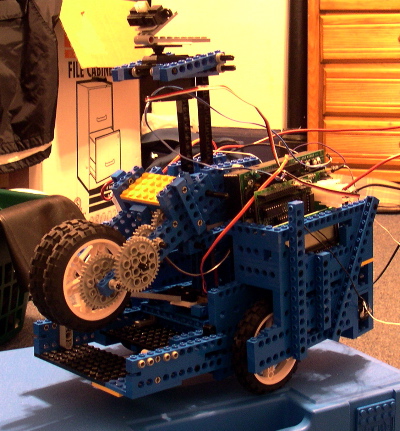
To our knowledge, our robot was the only one to feature a system for locating game objects at a distance. This is based on a distance sensor mounted on a servo on top of the robot. The servo rotates while the software takes distance measurements at various angles along the way. By doing some math on the collected data, we can work out a rough estimate of what lies in front of us. For example, we can detect the presence of an obstruction in the path of the robot, and even (with a fair degree of accuracy) distinguish it as a ball, cup, or wall, at a range of approximately two feet (which is a significant swath of the game table).
The typical demo we gave that many people found impressive went as follows:
We have created a Mathematica notebook that describes all the math involved in the working of the radar system. You can view it in PDF form.
The radar works beautifully; the robot turns to face the ball every time. Also, if you mount a couple of bright red LEDs onto the distance sensor, it looks really badass. (Think "Terminator"). Unfortunately, because our robot is unable to drive straight forward, we were unable to do anything useful with it.
We think that we would have had an extremely cool robot had we been able to work out the problems with our drive system. Nonetheless, it would probably not have won the competition. Because it spends time carefully searching for game balls, robots that were based on fast drive systems and prescripted motions undoubtedly would have beaten us to the cup.
Nonetheless, our robot in principle has capabilities very few others have attempted. If we had had a working drive system, we could find a ball once it has been knocked out of position, and we could navigate without the help of lines or walls.
In summary: