Okay, so we ended up with this robot that was completely different from our original Assignment #4 strategy. Our initial strategy was exactly like everyone else's final robot. It was basically to go up to the top tier and retrieve one of our balls and take it down to the lava pit. How were we going to do this? We were planning on making a robot thin enough (roughly 6 to 8 inches) to fit in between the "spheres." We wanted to fit between so that we could pick up the first sphere that was ours. After we picked it up, we would follow line down to the bottom tier, rotate, and drop the sphere into the lava pit. We then planned to protect the sphere from being thrown out of the pit, as we actually thought that a good number of teams would be able to place a sphere in the lava pit. How stupid are we?
After about a week of working on this strategy and deciding that there were too many vulnerabilities to account for, we scratched our design. It didn't help that we spent a good eight hours a day and had a robot almost fully built when we decided to scratch it after another night of brainstorming. In other words, we didn't work as much the next week.
So our new design was to have a turnstile-like device that sorted the spheres according to color. The spheres that were not ours we would rotate the turnstile towards the bottom tier, and the spheres that were ours, we would rotate and push the sphere back up the slope at a speed that would hopefully let the sphere float around the middle tier. Our favorite part about the robot was that it didn't have wheels. At least not the main robot. We built a small car that initially had two motors (so it could rotate), two bump sensors and three wheels on the front of it. This car was attached to the turnstile (base) with the tread and a few lego pieces that spanned 8 feet.
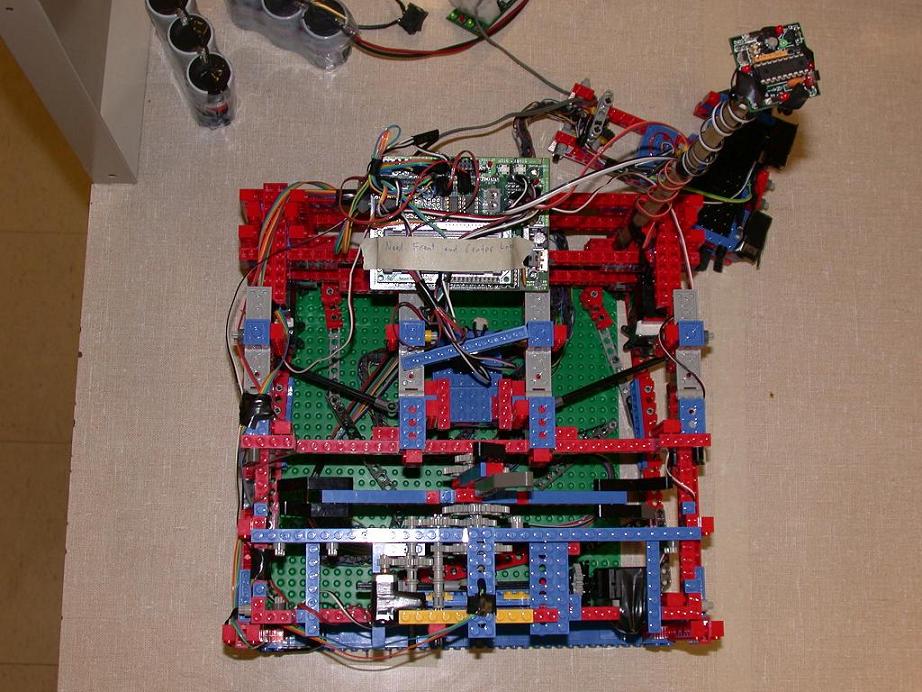
We initially thought the car would be able to be placed in the front half of the 12 inches we were provided and the turnstile would be in the back half. After building a portion of the turnstile, we realized that in order to detect the color of the ball and push the ball up to that sensor while being encased in the turnstile, that would require (and did) about 9 inches of the 12. So we had to make the turnstile portion (including the sensor) on a hinge that ended up making our robot 12 x 12 x 11 1/2 (inches). To push a sphere into the turnstile were two arms about 11 inches in length on either side of the robot. They were each attached to a servo that actually rotated underneath the turnstile in order to assist with pushing a sphere through. On the back of the massive thing was a plate also attached to a servo that simply pushed the sphere towards the center of the robot where the light sensor was encased to detect the color of the ball. The sensing was amazingly accurate since we completely encased the sensor and always pushed a sphere directly up to the sensor (ranging from 1/2 inch to 1 inch away). So our robot from a top view looks like the picture below.
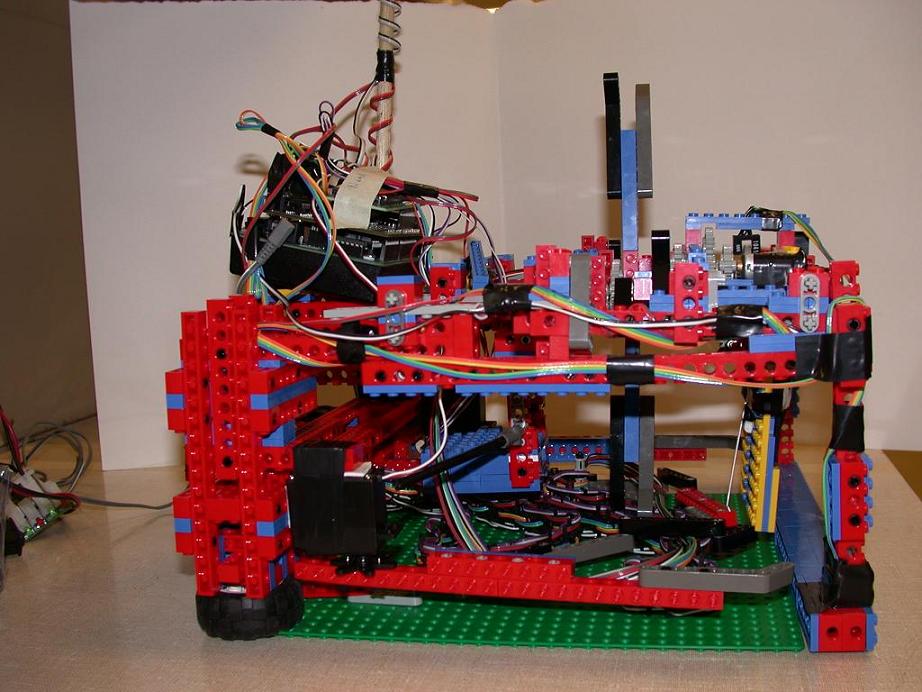
The mini car thing was modified the night before the impounding day to include four motors (as opposed to the two) when we tested it with the weighted down tether. It crossed the board (as the little car was going for the opponent's spheres) with two motors in about two seconds which we thought was too slow. After the four-motor modification the car crossed the board in about three-quarters of a second. Our "AI" for the car was to switch the direction of rotation every three rotations (using mod 3). This way we would initially pull spheres into our turnstile and then when it switched directions, it would get out of the way and also push any spheres in the middle area in front of our big robot down to the bottom tier. While testing the robot in lab, some teams watched our robot and called it "dangerous" because of the speed of the mini car and the damage it caused. The car is below.

So the first round of competition we forgot to turn on the handyboard. On the final night we dropped the little car right before we were supposed to go on, which led to a lack of enforcement in the mini car. When the start light started our car, it crossed the board in the same three-quarters of a second and then smashed into the side of the board and shattered. This pretty much screwed us over and we ended up in a double loss. That's it.