| |
6.270 Autonomous Robotic
Competition
|
IAP 2003
|
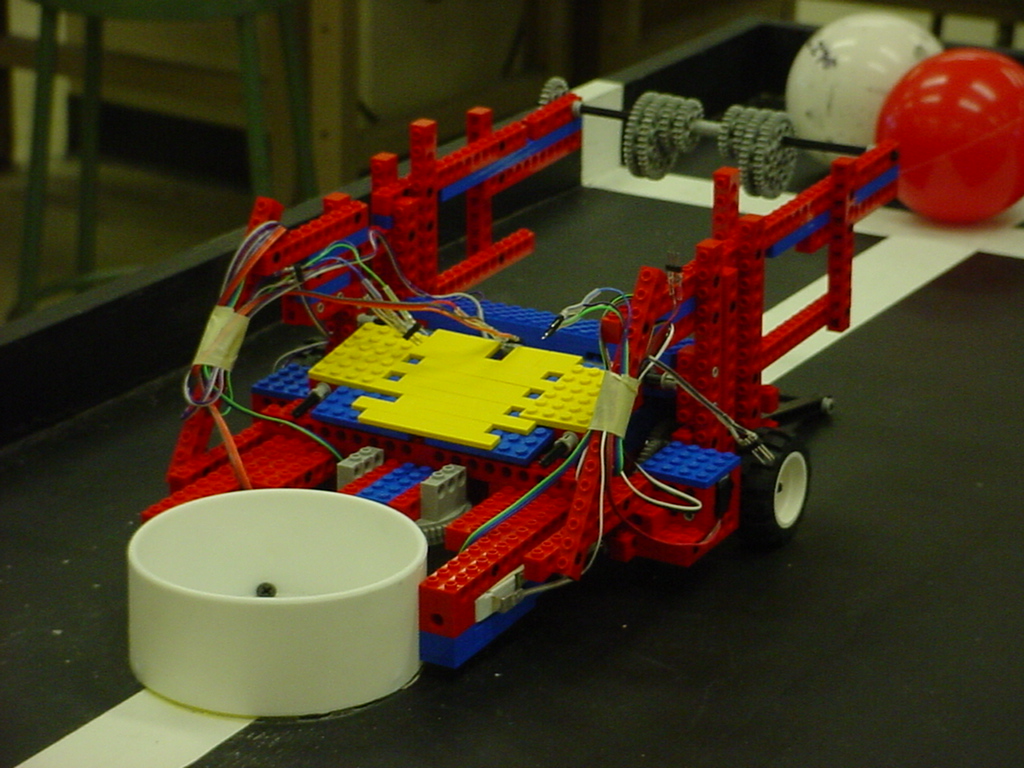
Robot Sucker
Overview
From the very beginning we were creating a robot that would
consist of the four major parts: feeding mechanism to grab the
balls inside, lifting mechanism to lift them at least two inches
high above the playing ground, storage chamber and releasing
mechanism to deposit the balls to the lava island. Step by step
we designed and redesigned all the mentioned parts of until
we finally came up with: rotating wheels at an axle in front,
at the ball's height along with plates on both sides to grab
the balls in the robot once stuck onto them; freely rotating
ramp to lift the ball once inside, plate with a clamp above
it to store and deposit the ball to either side of the back
of the robot. The back of the robot was triangle - shaped facilitating
the deposition of the ball to left or right side so that lava
island could have been approached from both.
Navigation
At first
we tried to ensure precise navigation by means of line following.
The project finished at the stage of mounting the color sensors
when we decided that wall following would be faster and more
robust. Our idea was to implement wall following without bumper
sensors but rather hug the wall sliding along its side using
small wheels attached onto both sides of the robot and constantly
driving towards the wall at an angle of about 6 degrees (big
enough to stay close to the wall, small enough not to get stuck
on it). In the end however, the wheels made our robot wider
than one foot so we had to detach them. Our robot was thus,
hard coded in this respect and did not use any sensors to move
straight. For turns, we tried hard coding at first but this
method generated different results in each run, so we used shaft
encoders on each wheel. After a couple of tests our robot reliably
turned at around 90 degrees to each side.
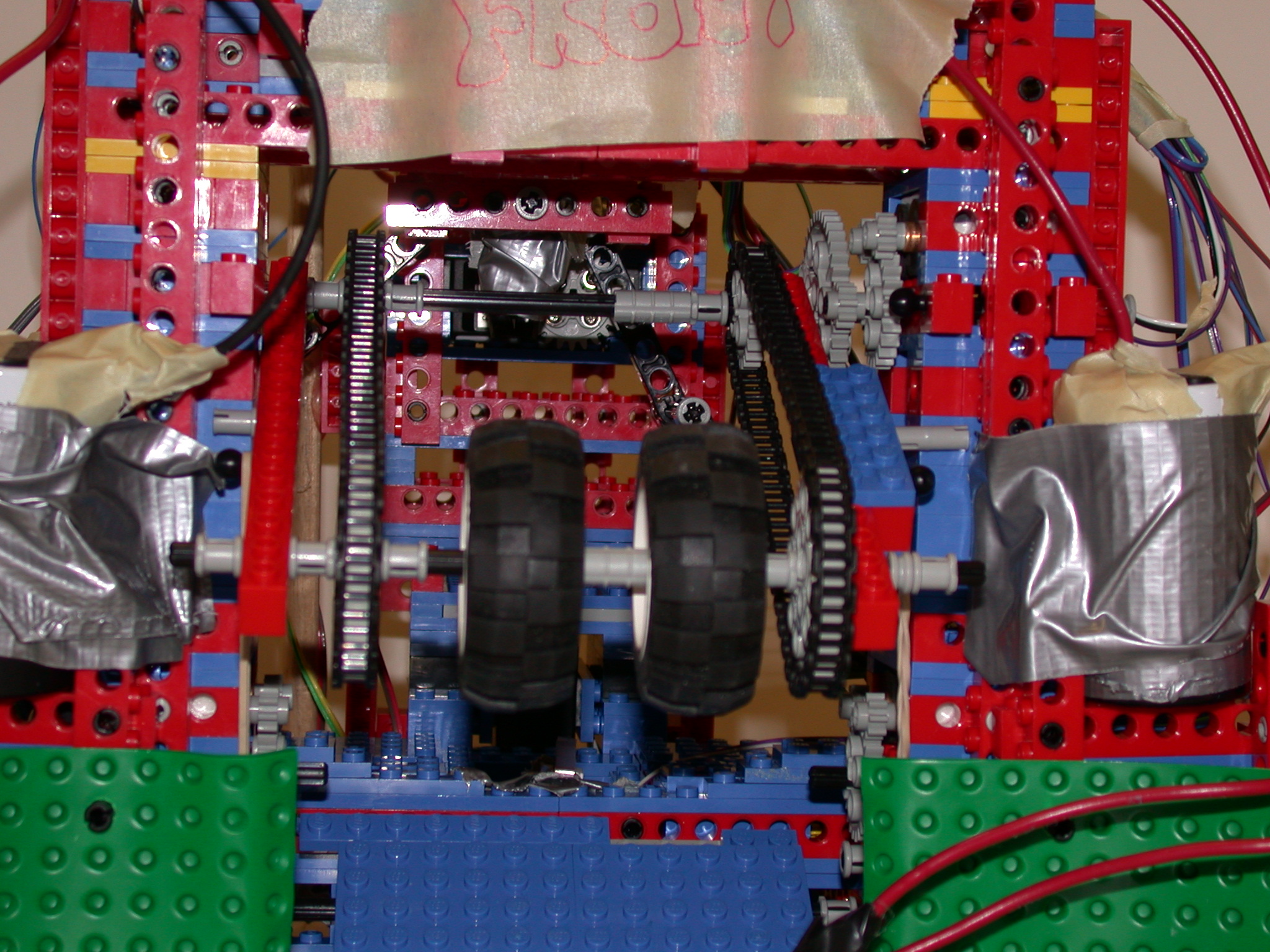
Power
We used
all six allowed motors and all of them at the maximum speed
:) We used two to power each of wheel and two to power the sucking
mechanism which was composed of a rotating wheels placed on
an axle coming out of the gearbox and extended by means of chains.
We used 27:1 gear ratio on the wheels and 15:1 reduction on
the sucking arm. The robot was therefore very fast (escaped
us very often:)) and the sucker was powerful enough to suck
the ball up the robot at the distance of about 6 cm where it
was later transported by the freely rotating ramp.
Sensors
A few.
Phew! (The winning robot this year had only four of them; we
were close to this number; we were close to winning. ;P)
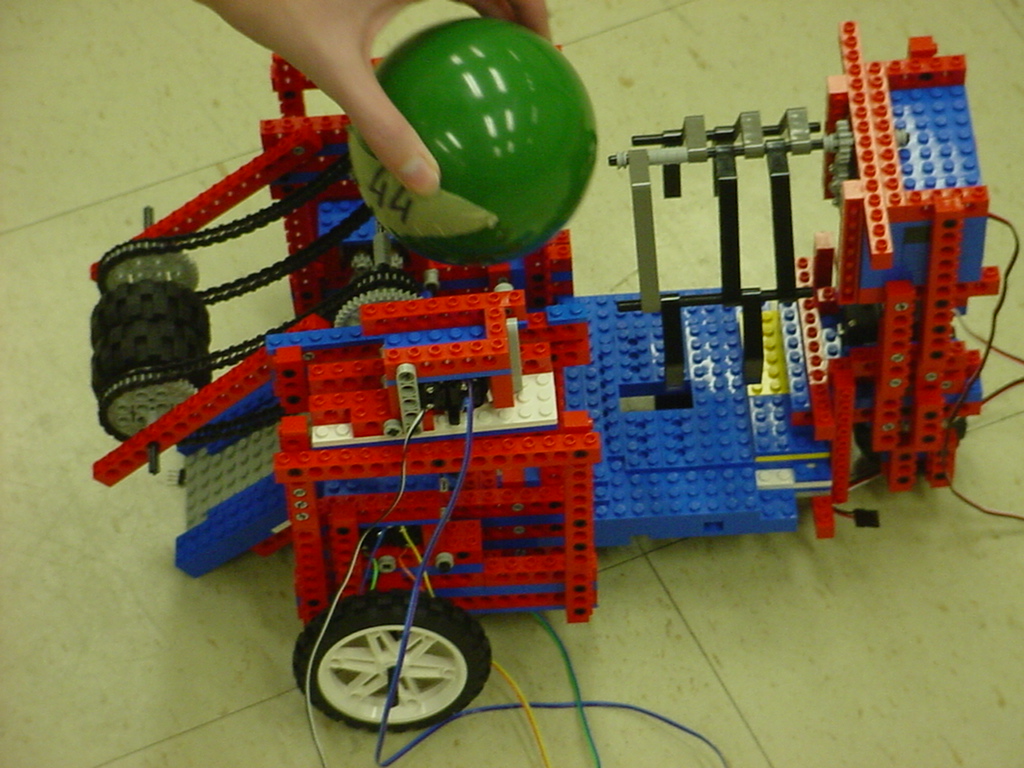
Construction
The
skeleton of the construction was the combination of the two
gearboxes on the sides with the plate at the back; everything
supported by three wheels arranged on vertices of a triangle
(one big stuffed wheel on each side plus another small wheel
attached to a turntable powered by a servo at the back). All
parts were strongly braced providing a sturdy structure supported
by the axle under the ramp as well as the sucking mechanism
topped with a roof where the handyboard resided. The batteries
were spread on the sides and at the back to maintain balance.
A pearl of mechanical design!
|
|
|