6.270 Team 49:
1.5 Brains
Wayland Ni, Kow Atta-Mensah, Lance Anderson
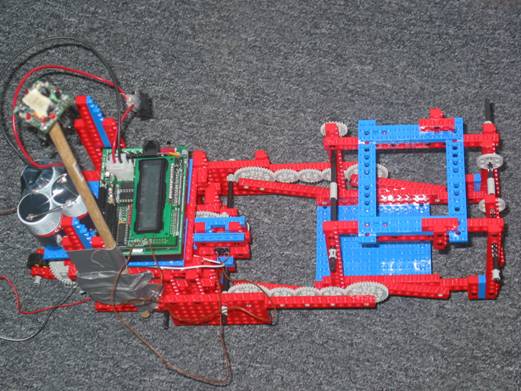
Physical Design
The basic concept behind our robot was to pick up two balls and be able to carry them. We built a lift platform and a storage platform. The lift platform was a flat piece of Lego with two arms on each side to lift the platform while keeping it level. The raising of this platform was powered by two motors hooked together by an axel linking the two gear drives. This created enough power to lift a ball. The lift platform had mounted on it a gate that would pull balls onto it and a gate that would push the ball onto the storage platform. The gate on the front of the lift platform is made of two 12x1 unit pieces each connected to a pulley and an axel so that they both spin with the axel. There is another axel that runs between them at the bottom to push the ball. Once this gate pushes the ball onto the lift platform the lift platform is raised. There is a second gate on the back of the lift platform that pushes the ball onto the storage platform. This gate consists of an axel with two wheels mounted on it. These wheels push the ball along onto the storage platform. Once the ball is on the storage platform the lift platform is lowered so to collect another ball. On the back of the storage platform is a third gate. This gate pushes the ball off the robot into the cup on the table.
Strategy
Our strategy to use the devices we have built on the robot is as follows. We start off by collecting one of our balls and one of our opponent’s balls. Then we take our ball and drop it in the cup for four points. Since we have one of the opponent’s balls they can only score three. We think this strategy would have worked well if we had gotten our robot completely working.