Strategy
Our initial strategy at the beginning of the month was simply thus: to gather as many of a single color of balls to outvote the other team, and then use the other-colored balls to negatively score in the opponent's scoring zones. More specifically, the idea was to take the six nearest balls (the bi-colored ball zones), and then the next two groups of balls, either to the right or left, based on which direction the opponent's robot decided to move.
Let's suppose the opponent's robot turned towards the red side. After taking in the the six mixed balls, our robot would then attempt to turn towards the green side and gather the nearer groups of balls. Ideally, these fourteen balls would then be used to vote in the green side, turning the vote in favor of green. The next eight green balls would then be pushed into our scoring area at the far side of the table, and the rest pushed into opponent scoring areas, thus maximizing the score gap.
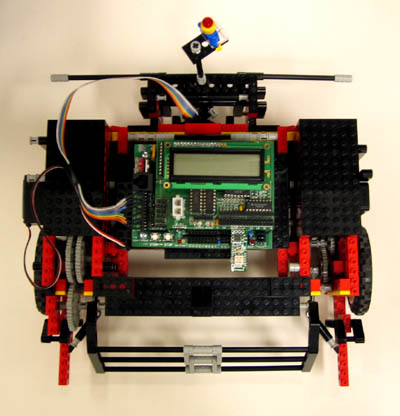
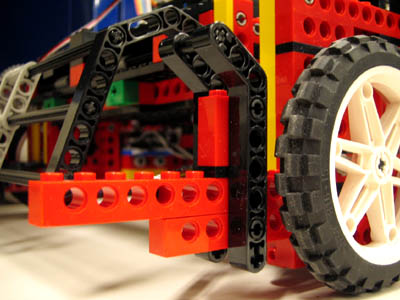
The robot was to be navigated by only the RF system and a gyroscope, with distance functions to control starting and stopping and trigonometric functions to calculate precise turn angles. A 1:45 ratio gearbox was implemented in a quadruple motor, two-wheel differential drive system, for maximum speed with formidable torque.
In reality, did any of this actually work? Of course not. Well, not all of it.
What actually carried our robot through three eventual wins? Well, it oriented correctly. This means that it new which way to point to collect the first two mixed balls near the center wall. Then it successfully made a 180-degree turn, allowing it to collect the next four mixed balls, carrying the six altogether into the nearby scoring area.
Then it froze.
And that, folks, is how we placed in the top quarter of the 6.270 competition robots. |
|

The competition robot's servo/motor gearboxes. |