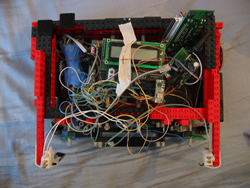
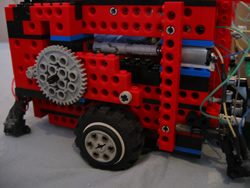
Our
design for the final robot consisted of two motors driving two wheels
and four additional stabilizing wheels (two in the front, two in
the back). We connected a drive-shaft to the motor for a constant
connection to the gears regardless of movement in the motor's housing.
We used four sets of IR photoreceptors, one on each corner, that
the robot used to orient itself when the match began. We used a
gyroscope to help turn accurately to given angles. We had a scoop
in the front to push the balls, and we had two switches connected
in series on top that acted as bump sensors. The physical structure
of the robot was reinforced using crossbars, and even individual
pieces were bolted horizontally with their neighbors to provide
a very strong physical structure.