| We
went through mainly two different versions of our robot. Our first
version was driven by four wheels; two motors that each drove
two wheels using our gear-chain set-up. This page explores the
design behind the first version, as the design for the final version
is covered in the design page. Though
we were pleased with the design, in the end we were forced to
redesign our robot because this set-up created too much friction,
and the given motors could not support it. |
 |
 |
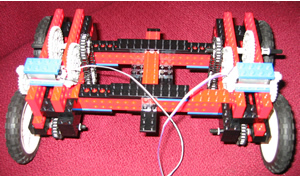
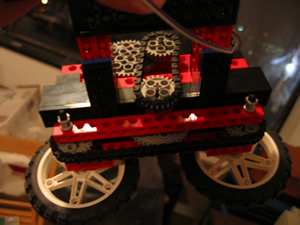
| The
skeleton structure of the four-wheeler, with gears/chains and
motors assembled. |
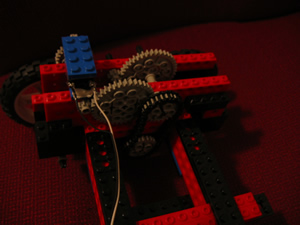
A
closer look at the gear set-up (inside left). |
|
|
|
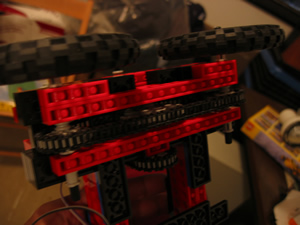
| Underneath
the robot. |
Looking
inside and under the robot at the drive set-up. |
|
 |
 |