
Alex is a Course 6 sophomore, living in Doomcom in Senior Haus. He enjoys The Simpsons and building things, whether it be out of Lego, chainmail, leather, or the rotting bodies of his fallen foes.
Alex was primarily responsible for building and reinforcing the Lego structure of the robot, and wrote the final form of the navigateTo function

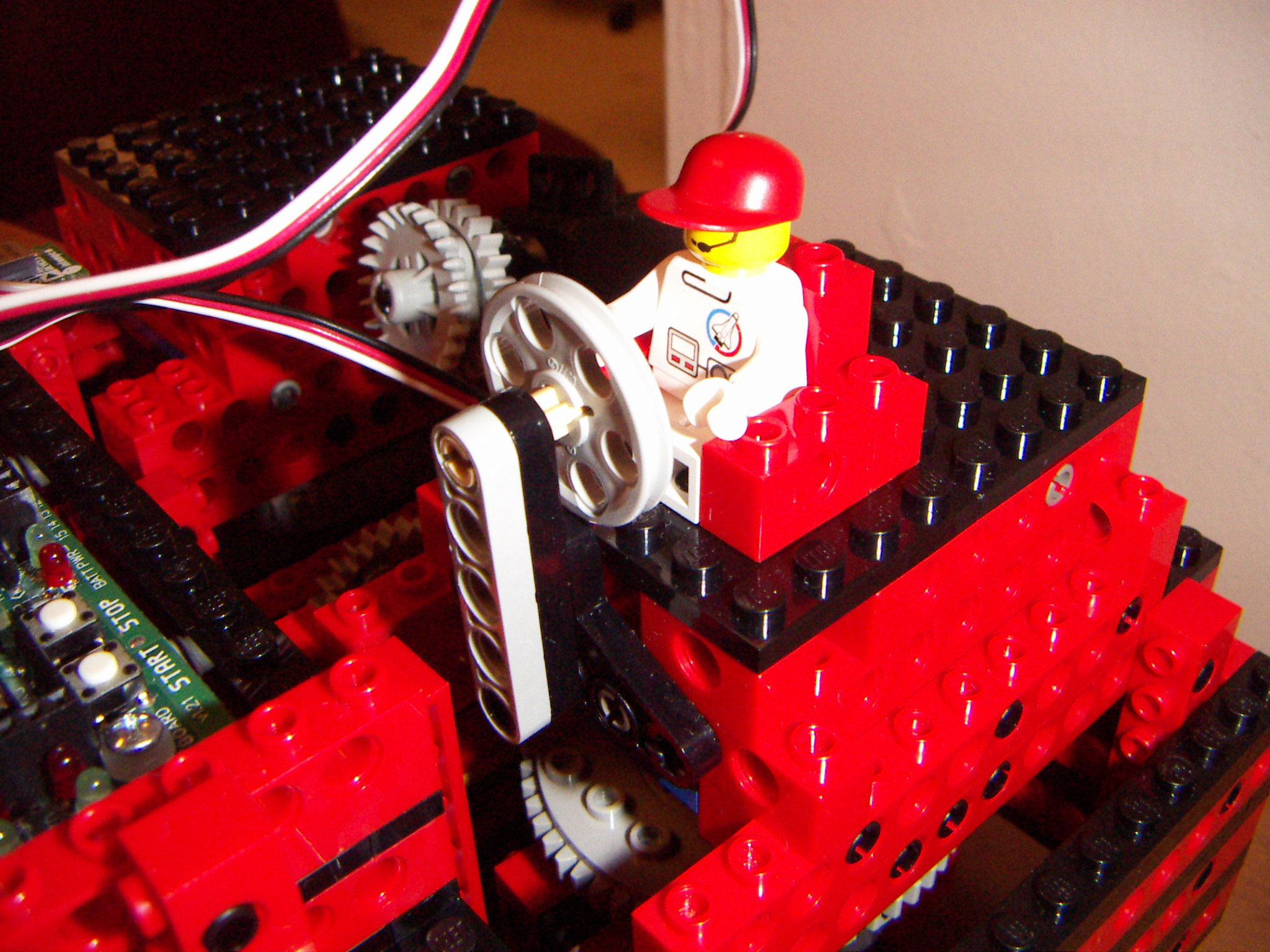
Bob's race was once a dinosaur, once a very long time ago in the Middle East. After rotting and being sucked up out of the ground as oil, the slick from which he and his race were formed was purchased as ABS plastic granules, subjected to 450 degree heat, and formed into arms, hands, head, torso, legs and hat. These were then snapped together by a gigantic machine, and he was tossed into a box and delivered on a palate to MIT.
After arriving on the MIT campus, Bob demonstrated his skill at sitting on the robot and watching other people work. During Kat's 36 hour coding marathon, Bob demonstrated that while he does not know IC, he is nice to talk to at 3 AM. He is also an excellent driver, and was named (by several onlookers) the Drone Racing Association's World Spinning Champion during and after Quals.
Bob's main task was to drive the robot during testing and competition.

Hilary is a freshman, considering Course 3, who likes to play with robots. She lives in Random, and likes the color green.
Hilary had a host of jobs on the robot, ranging from soldering to code to lego.
Kat was primarily responsible for the code and sensors, as well as operations (i.e. calibration and placement in competition).
{kind=link}