Naoshin
Haque & Amjad Afanah
(Vimal in the background)
Team
17: Robo Raheeb |
Team
Members |
|
|
Naoshin
Haque & Amjad Afanah |
Lynne Salameh |
Our
Robot |
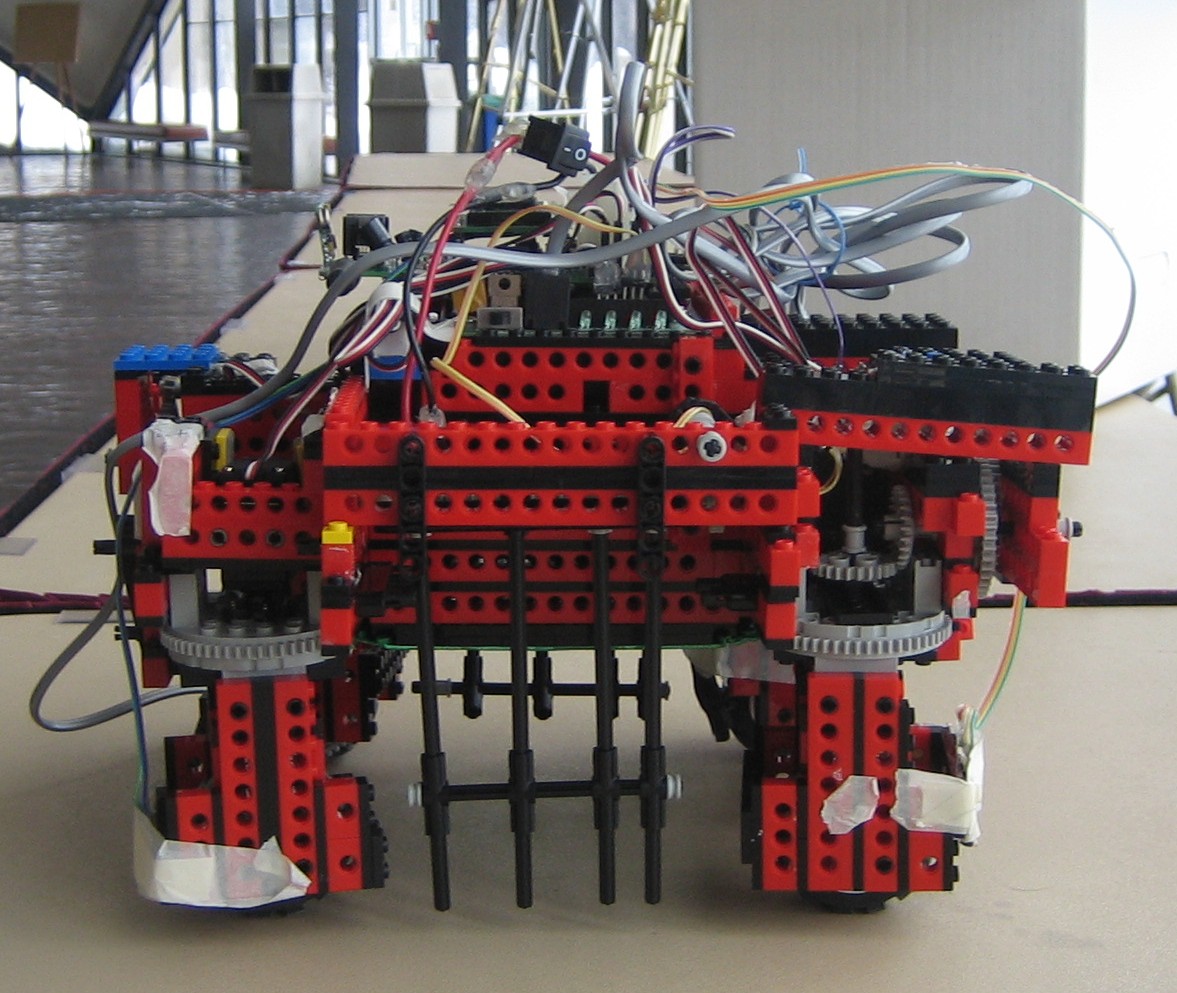
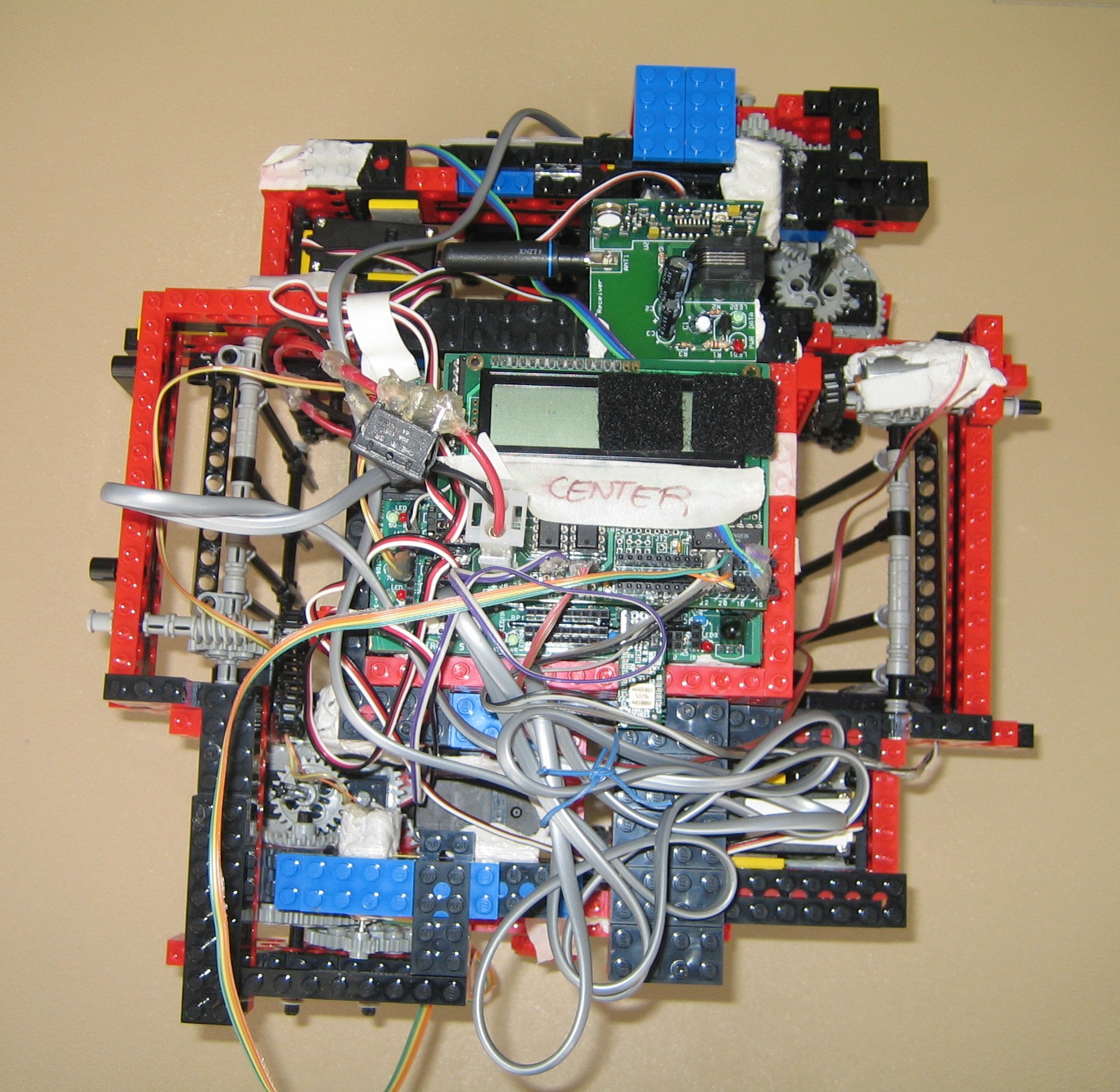
Our robot was named "raheeb." Raheeb in Arabic means "awesome" or "amazing." We came up that name hoping to build a truly amazing robot. Although our robot didn't succeed in the qualifying rounds due to unexpected technical difficulties, it was very efficient and turned pretty accurately. Our robot also looked pretty cool :-)
Also
listen to the song "Raheeb": |
Important Features - Synchro Drive: Our robot was one of the very few synchro drive robots in 6.270. Synchro drive means that the wheels can rotate independently, and hence allowing for maximum driving efficiency. We used four servos; each servo was attached to a wheel, and four motors; each motor was driving a wheel. - Relatively high gear ratio: Our gear ratio was approximately 100:1. The high gear ratio allowed for greater torque and more driving power. |
Our
Strategy |
| Our First Ambitious Strategy |
 |
 |
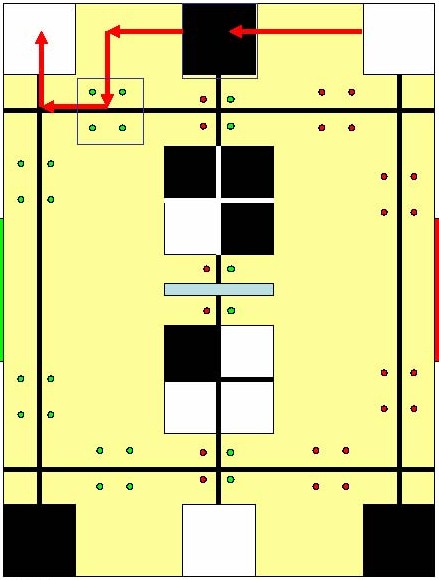 |
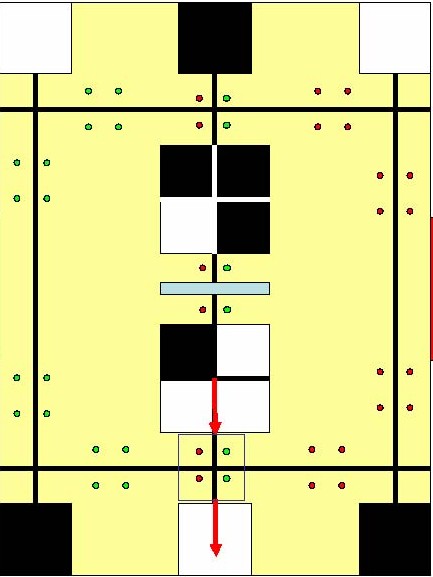
| 1. We place the four balls that are facing outward into the white scoring area. | 2. Using the fast synchro drive, we allow the robot to make right-angle maneuvers and collect the four red balls on the other side of the board. We place the balls into the white scoring area on the right. | 3. Assuming that our opponent has scored the four balls that are directly facing his robot, we allow our robot to pick up these balls. We then collect the four green balls and place them in the white scoring area. The total score in that case = 8, (no matter what the voting result is). |
| Our Second Ambitious Strategy - Similar to Mike Lin's Strategy |
 |
 |
 |
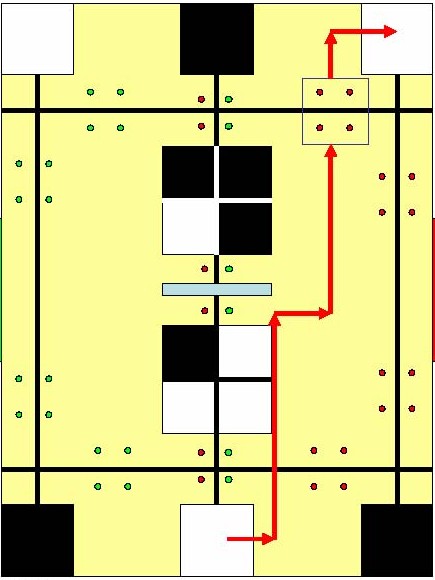
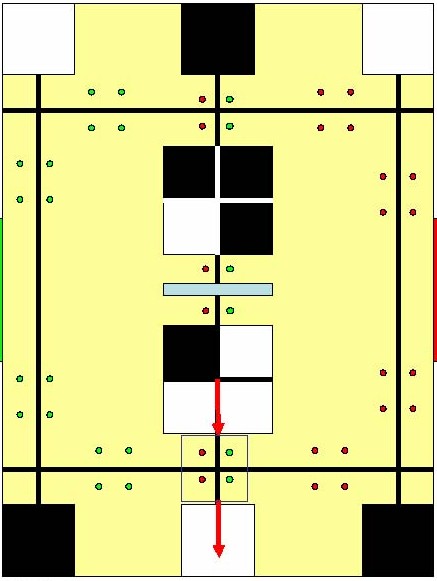
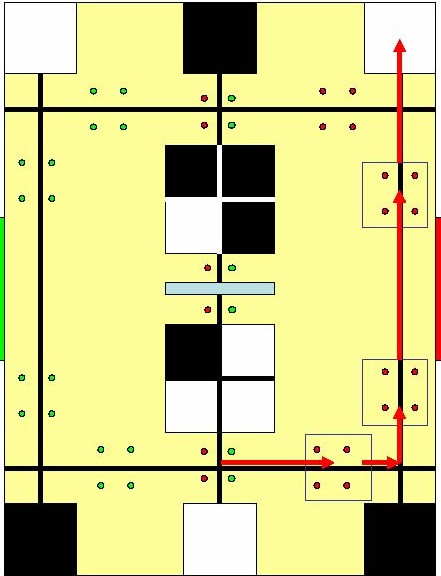
| 1. We place the four balls that are facing outward into the white scoring area. | 2. Using the fast synchro drive, we allow the robot to make right-angle maneuvers and collect the twelve red balls along the right side of the board. We place the balls into the white scoring area on the right. | 3. Depending on the voting result, we either remain in the white scoring area or drop all of the balls collected into the opponent's scoring area. If the vote was in favor of the red balls, we stay in our scoring area. If the vote was green, on the other hand, we drop the balls into the black scoring area. The total score in the first case would be 26. In the second case, the total score would be 2, but with -12 for the opponent. |
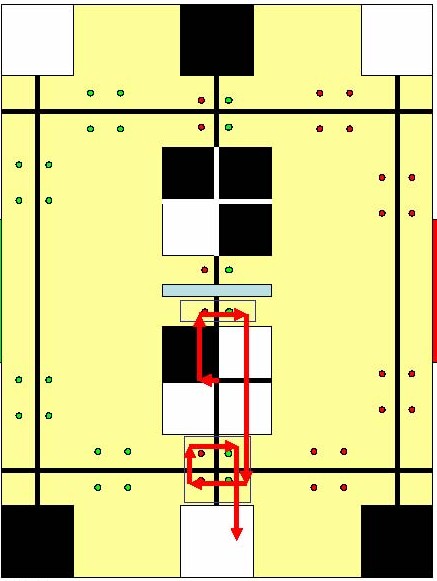
| The Actual Strategy |
 |
||
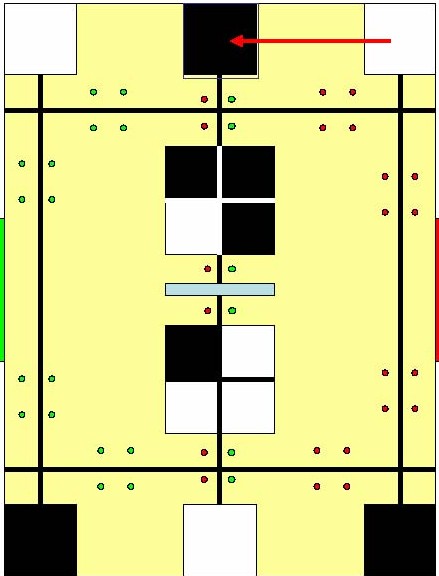
| Due to the challenges we encountered trying to make the hardware work, we had no time to modify our software properly. As a result, we picked a very simple strategy, whereby we pick the two balls facing the wall first, and then we pick up the four balls directly downwards. We then place the six balls we have collected in our scoring area. The score in that case would be 3. |
Our
Code |
Here is a link to some of the code we wrote: |
| gyrocode.c
servo.c fsm.c led_mod.c overall.c raheeb.lis |