MOCK
COMPETITION
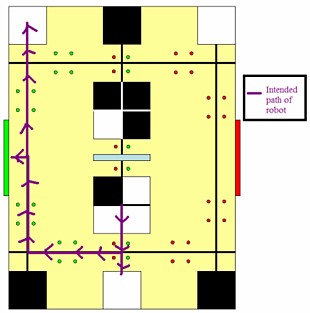
Picasso-bot entered the mock competition with our preliminary strategy.
It traversed the following route by times (it was programmed to go forward
for a certain amount of time, make a turn, and then go forward again
for another set length of time). Our robot was successful only once.
It got stuck in two out of the three matches, but we ended up placing
3rd out of 8 teams and got really cool mini lego sets and extremely
funky looking pens.
|
|
 |
|
| PRELIMINARY
COMPETITION
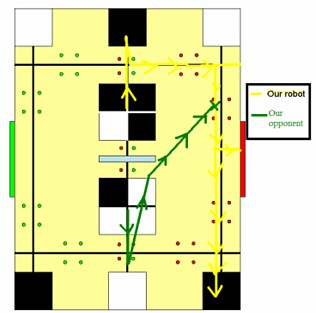
Our robot performed decently in the preliminary competition, although
it only scored two points. We successfully pushed 4 balls into our scoring
area, and voted 4 red balls. However, our opponent pushed away the 4
red balls that we intended on scoring. We also got stuck against our
opponent for a while, but we managed to pull through in the end.
FINAL COMPETITION
We performed very well in the first two rounds, scoring 12 and 11 points
respectively and got placed in the top 11 teams.
In the first two rounds our opponents were not very strong, and did
not obstruct our path. However, we lost our 3rd and 4th round matches
because we lost our consistency in scoring the 4 points behind us, and
also because our strategy did not allow us to avoid our opponent, and
we ran into them.
|
|
 |
|

