
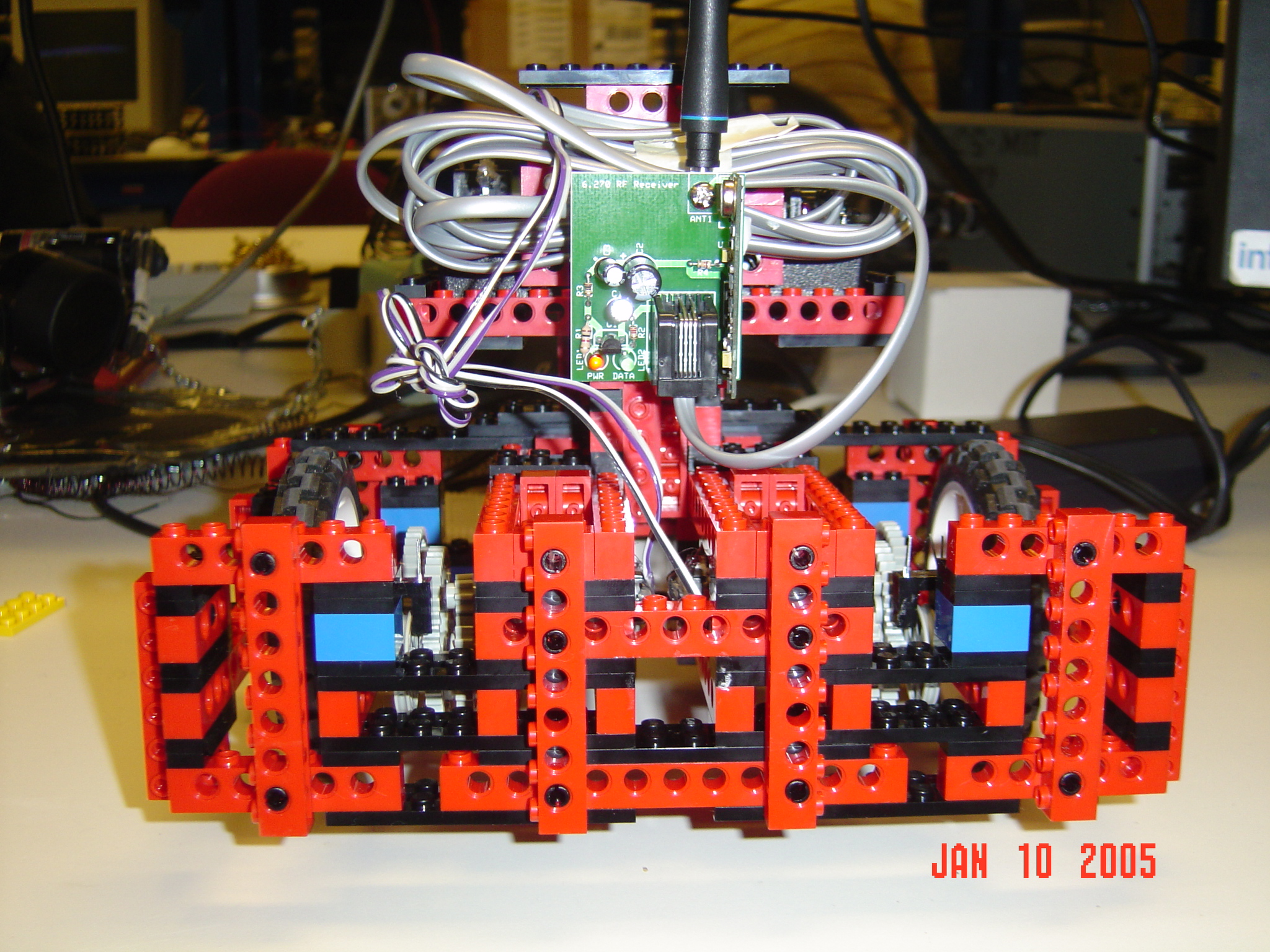
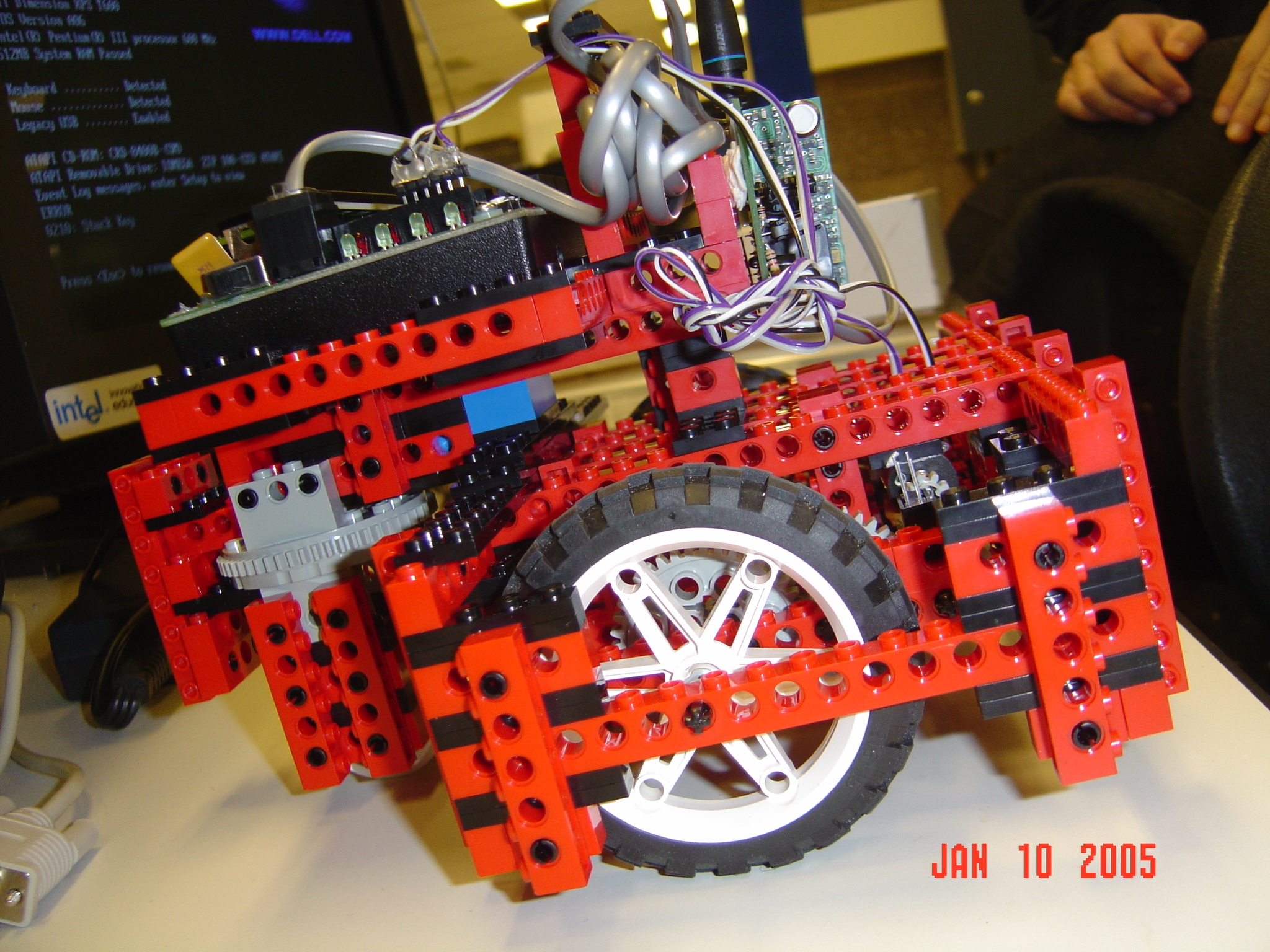
WE'RE DONE!!! Check it out.
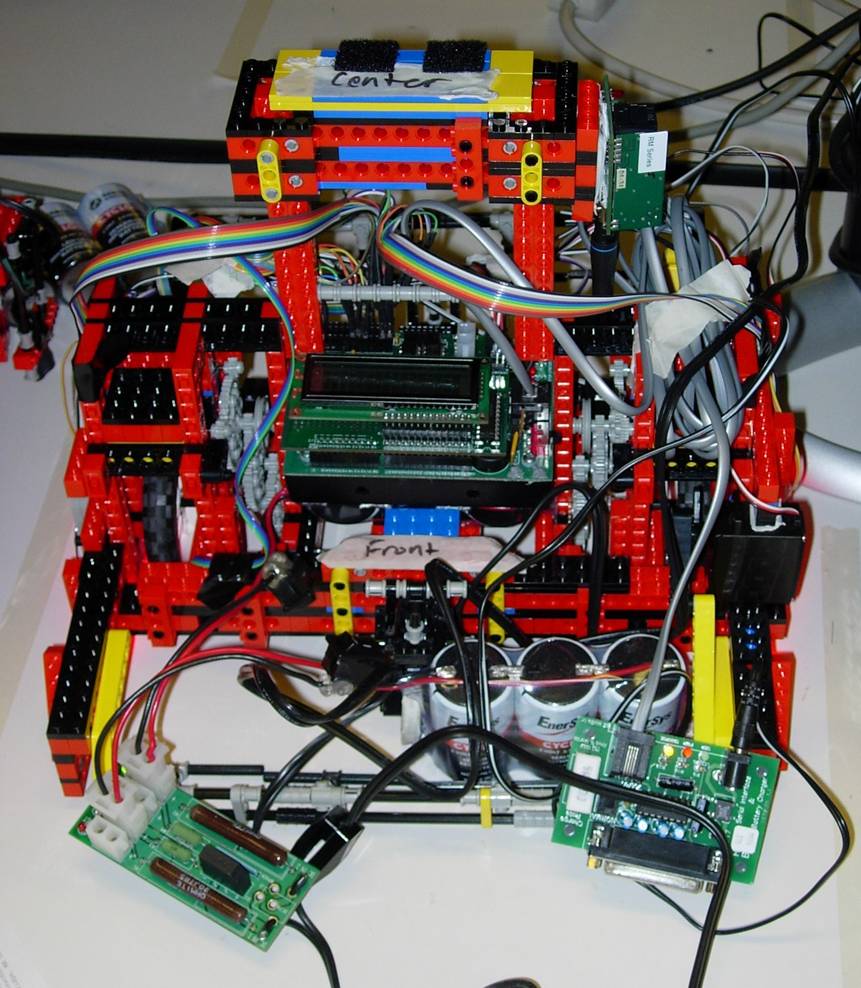
What do you see? Can you find all the parts of our robot, including:
- Front Label
- Center Label
- Velcro strips for swatch mounting
- Handyboard and serial interface/battery charger
- Hawker batteries and battery charger
- Servo-enabled one-way ball gates and compartments
- RF antenna card
- Phone cable
- LED "underglow" lights
- 4 IR LEDs and phototransistors for detecting board color.
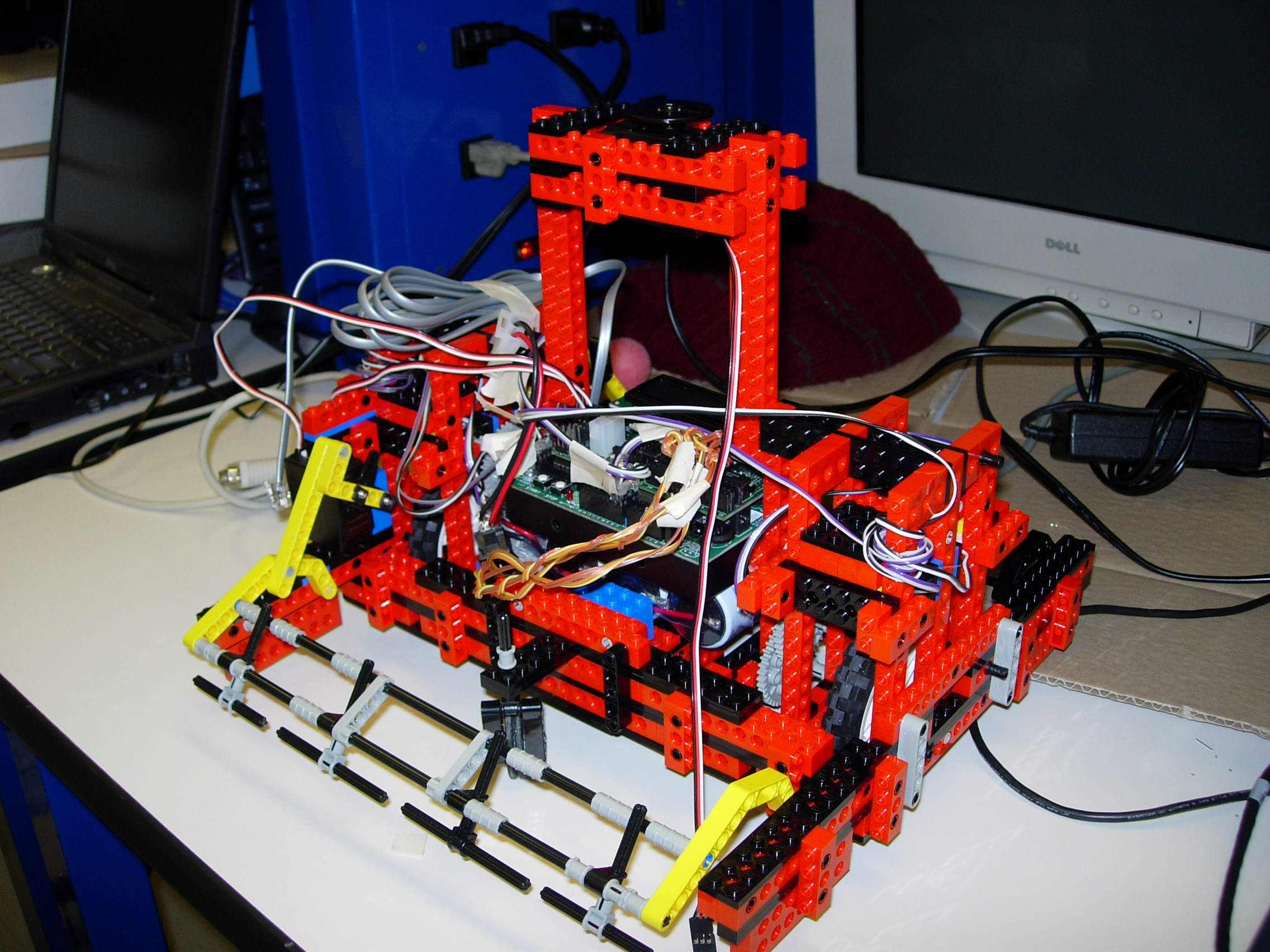
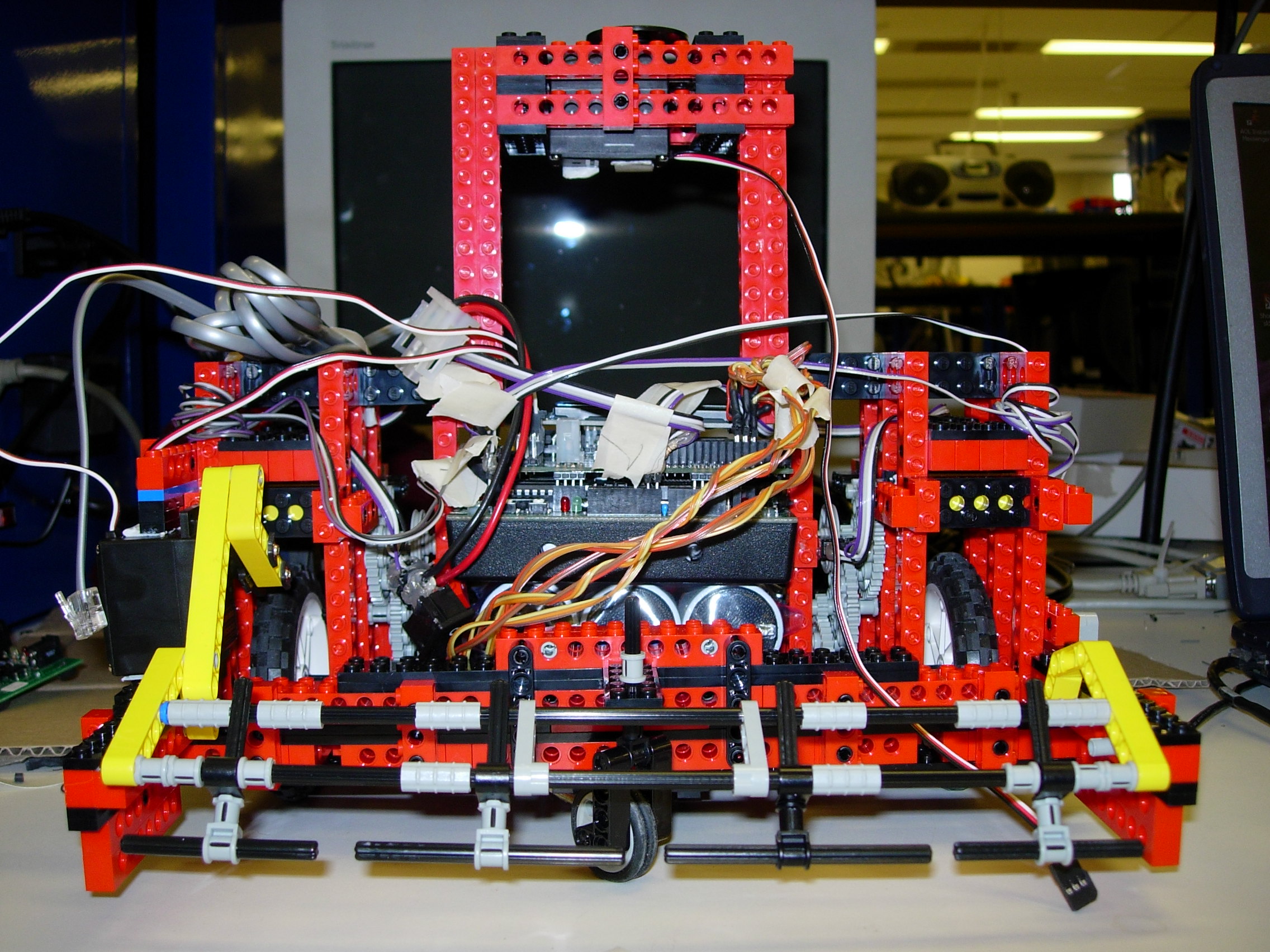
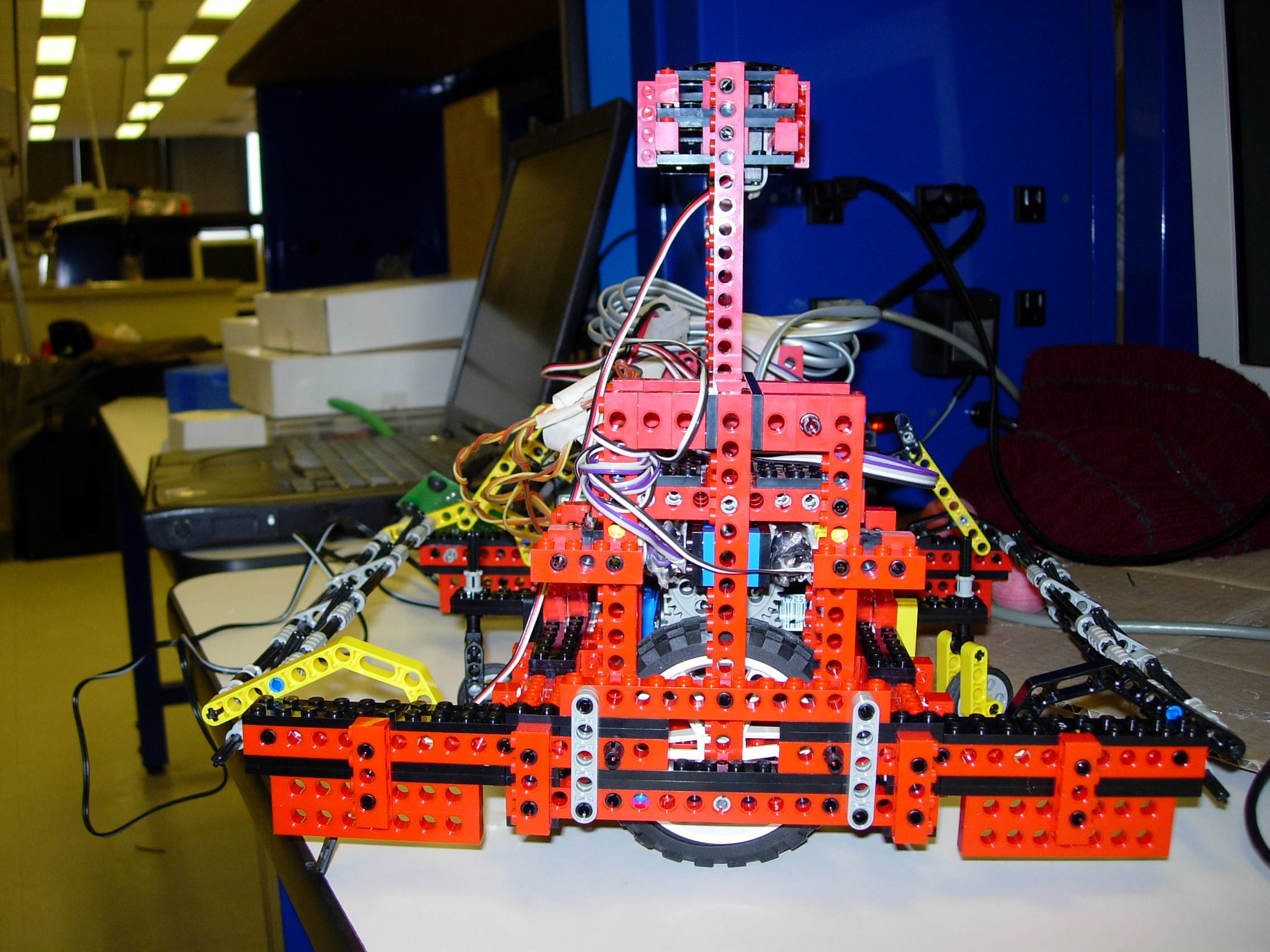
We changed the design of our robot to have the dual gate system. The color sorting ball collector had many problems that we did not want to deal with. Our dual gate system works, and its nice to have a robot that has a center of mass at the center. This means we can spin around in circles very effectively. We even included a handle that allows us to carry the robot with just one hand. This robot has a differential drivetrain with gear ratios of 1:125 on both sides. Each wheel is powered by two motors, giving us a lot of torque that could prove useful in shoving other robots around during the competition. The two gates are one-way ball gates and they can be opened using servos. IR LEDs and phototransistors were placed on the bottom of the robot to determine the starting orientation. We also worked on designing strategies for our robot to follow during the various competions.
Week 2: Boba-F.E.T. 1.0 - Design ExperimentationWe decided to use a differential drivetrain for our final implementation because so that we could turn 180-degrees easily. We experimented with using a ball collector that would spit the balls up a ramp to be collected and sorted using a light sensor. If this does not work, we hope that we can implement a dual gate system within a few days and have that robot up and running well before the competition. We moved the gearbox to a vertical orientation to increase the lateral space within our robot for future applications. Assignments 4 and 5 were used to help us create algorithms for orienting the robot at the start of the competition. Having learned how to use the more unique pieces in our Lego sets, we created "shopping cart" castor wheels to aid in the turning of our robot.
Week 1: Robot 1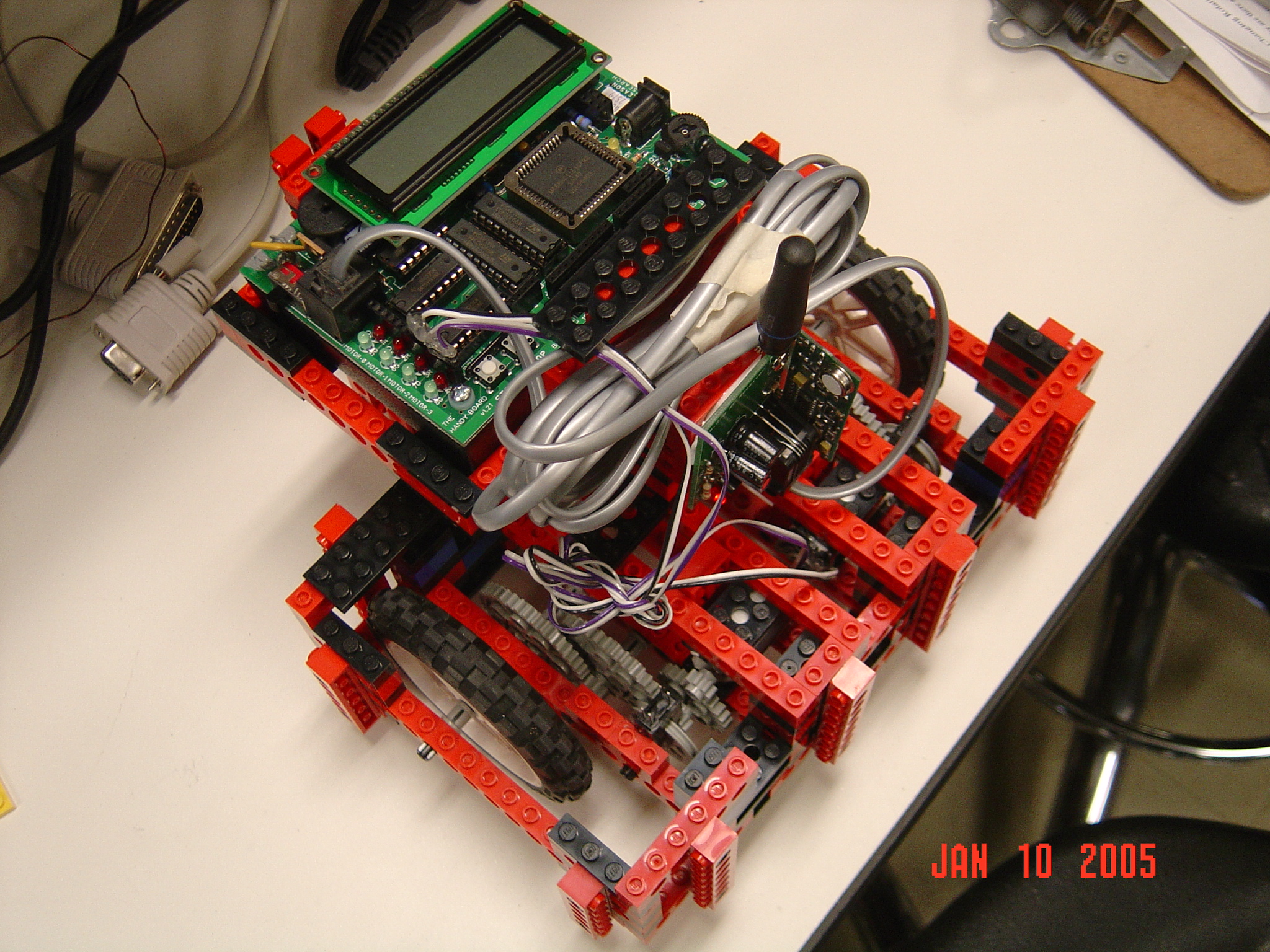
We built "Robot 1" in week 1 to experiment with ways to build things with Legos and to design a preliminary robot that could perform basic tasks, such as bouncing away from a wall and driving to a certain point on the board using coordinates given by the RF signal. This robot had a differential drivetrain with a 1:75 gear ratio to power the wheels. A stationary castor wheel was positioned on one side to maintain the balance of the robot.