| Team
Members:
Craig Brophy (6-3, 18) - cbrophy,
Tim Koch (4) - timkoch, YiOu Wang
(5) - yiou
Labor
Division
Craig coded
since he was well practiced after a hard semester of 6.170. YiOu and
Tim were on the hardware team, with Tim assembling the electrical components.
Strategy:
We designed a simple but robust robot that would consistently score
around 10 points. It first orients and pushes the four balls directly
in front of it into our scoring bin, to ensure at least 2 points. Then
the robot drives around one side of the table collecting balls of the
same color. Depending on the vote at the end of the round, we put these
collected balls into either our scoring bin or our opponent's.
Outcome:
We preformed
fairly well in competition, although we were never able to finish our
runs as we would either collide with the other robot or get hung up
on the wall during a turn. In the end we were 3-2, tied for 7th place.
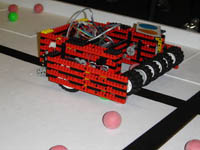
Physical
Build:
The robot
had a simple horizontal design with vertical bracing. One motor powered
each wheel, and a third motor powered the spinning ball grabbing. We
turned and drove straight with a gyroscope. Distance was measured by
shaft encoders in the geartrain.
Initial position
and orientation was determined by an IR LED-phototransistor combination
at three corners of the robot. These allowed us to know if we were on
a black or white square.
Code:
You can see our code posted
here:
competition.c
movement.c
gyro.c
| Pictures: |
|
|
|
 |
 |
 |
 |
| Driver's Cab |
Rear Caster |
Color Sensing Unit |
Robot Driving on the
Table |
site designed by tim koch |
