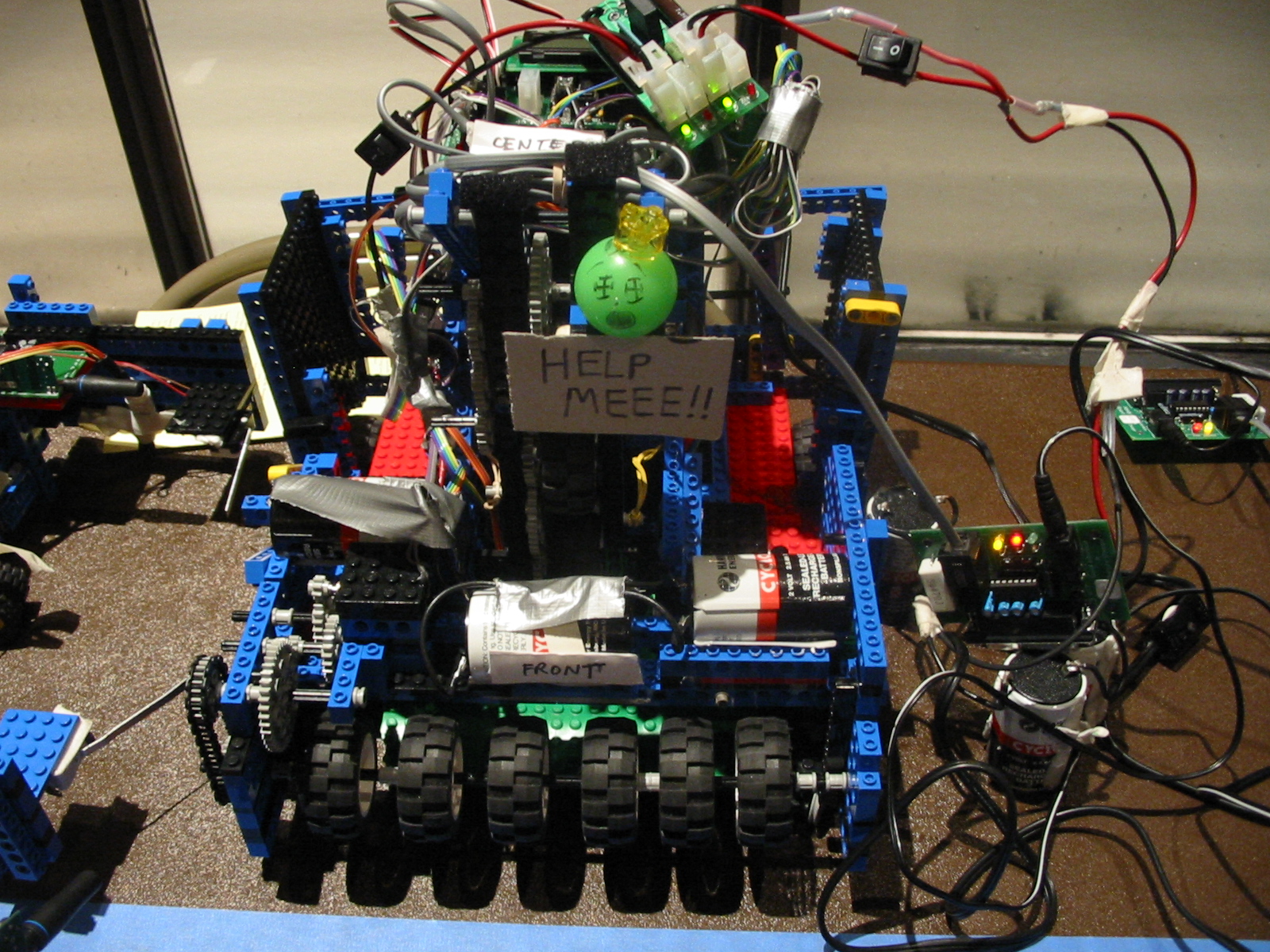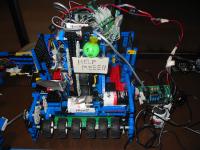
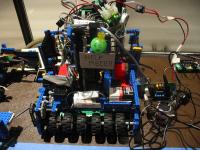
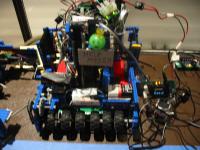


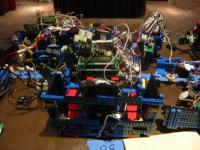

Features of the robot
> differential drive train - one motor per wheel on the two back wheels
and two caster wheels in the front
> spinning wheels in the front to suck in balls
> spinning wheels in the middle of the robot to elevate the balls onto the sorting platform
> baseplate makes the ground higher so that the balls can be reached by the spinning wheels in the middle
> ball sorter is a platform that tilts either one way or the other depending on whether the ball is red or green
> visual sensor in the tower detects the color of the balls
> doors in the back flip down to let out the balls in the end using a servo
> 3 ir sensors on the bottom of the robot on the top right, bottom right, and bottom left to detect the orientation of the robot in the beginning of the round
> most navigation depended on the gyroscope
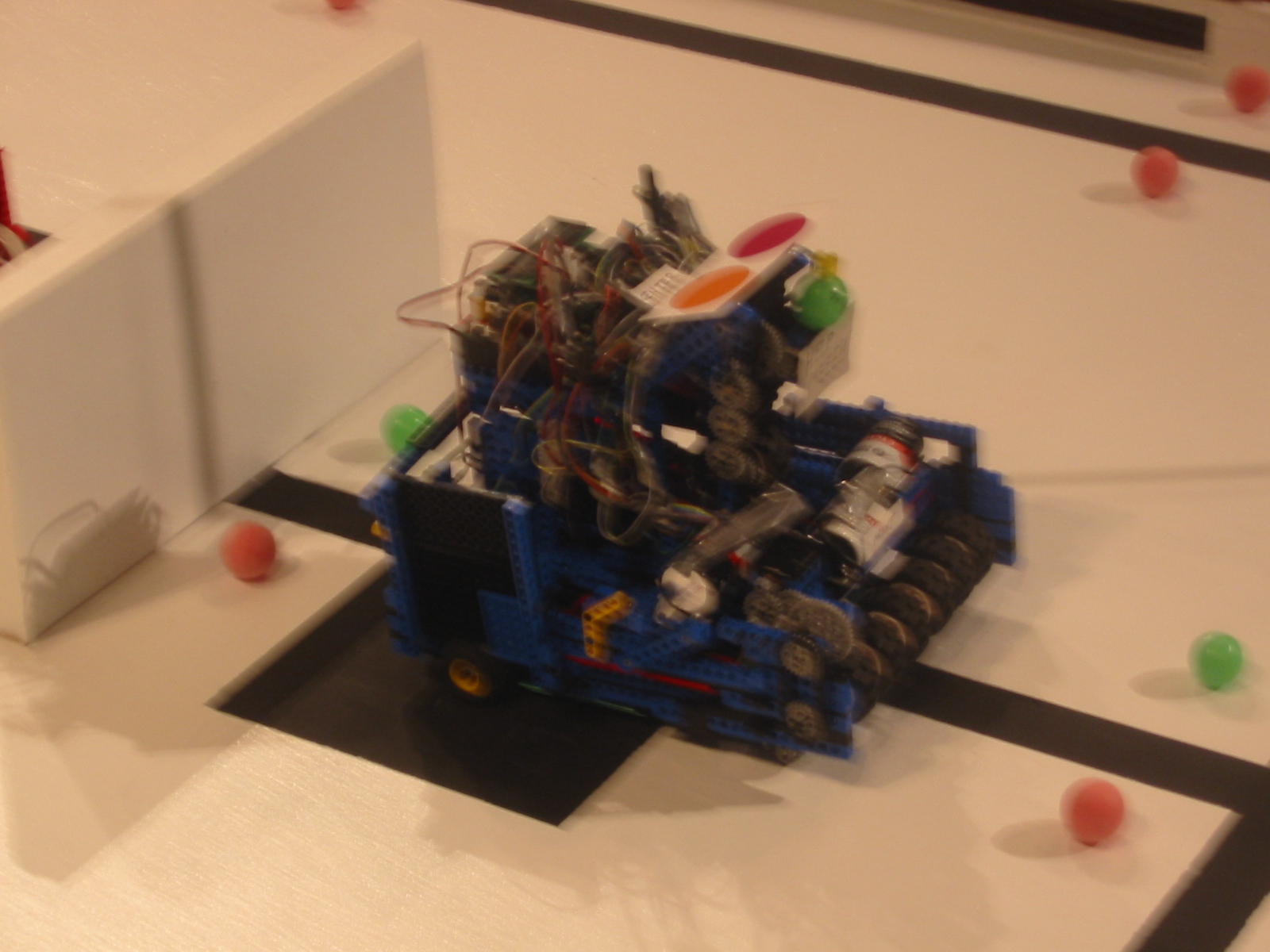
Strategy
*when the round starts, check the ir sensors on the bottom.
*depending on which ones are white and black, it determines which side of the board it's on and which way it's facing.
*it then orients itself to face outward
*then it turns left, drives for a while, turns left, drives for a while, turns left again, drives for a while
*during this time it collects balls and sorts them
*then it will check the vote and depending on which vote is winning, orient itself between two scoring areas so that the positive point balls will be dumped into its scoring area and the negative points will be dumped into the other robot's scoring area
|
|