Team 51:
Trogdor the Burninator
Team Members: Steven Chait, Zachary Clifford, Mohammed Hussein
Story of the name: Trogdor the Burninator became our official name when we realized that our robot had a distinct affinity for fire. Blue smoke erupted from our Handy Board no fewer than three times throughout the competition, and we suffered from a variety of electronic problems. We had hoped to repair it so that it could focus its fiery tendencies on other robots.
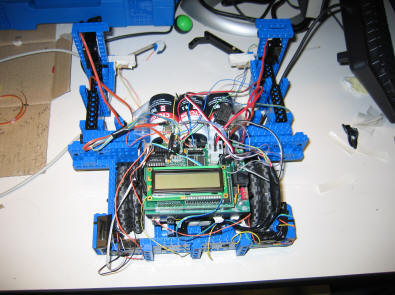
General Design: We wanted to be fast and different. Trogdor is powered by the differential housing shown below. The differential housing is the small grey piece between the wheels.
The differential housing made Trogdor drive very much like a normal car. It had a steering wheel in front and rear wheels linked to one gearbox system. The differential housing allows torque to be transferred between both wheels so that the robot can turn without slipping and can transfer torque to the free wheel if one wheel becomes stuck. This also made driving straight very easy.
However, this had some very negative consequences. For one, the rear wheels could not turn independently. This made turning code very complicated because we had to ensure that we were not near any walls within our turning radius. We also had to rely on the steering wheel to turn us. This system worked in testing, but the new paint used on competition day was much slicker than anything we had tested on before. The steering wheel could not keep traction on the table and we were unable to turn in the competition.
Strategy: We wanted to be very fast. We wanted to be very, very fast. Our strategy was to quickly scoop balls in the front part of the robot and score with those balls. We then wanted to travel to the other side to collect more balls. We then wanted to vote with those balls to ensure that our original balls won the vote. We would additionally be rather timid. We used the RF system to help us keep away from the opponent to ensure that we did not get stuck on the enemy robot.
Our team really came together to solve the 6.270 challenge effectively. However, we did spend hours and hours working on the robot. We pulled a few all night sessions in lab working on the machine, and we spent countless hours of daylight debugging and rebuilding. The competition was really entertaining, and we all have a better understanding of LEGO and robotics in general!