Design
Length: 1'
Width: 1'
Wheels: 2
Motors: 2
Electronics:
Gyro
2 distance sensors
4 hawker batteries
Code: Drive straight function is a third order PID function
Turning function is a PI function
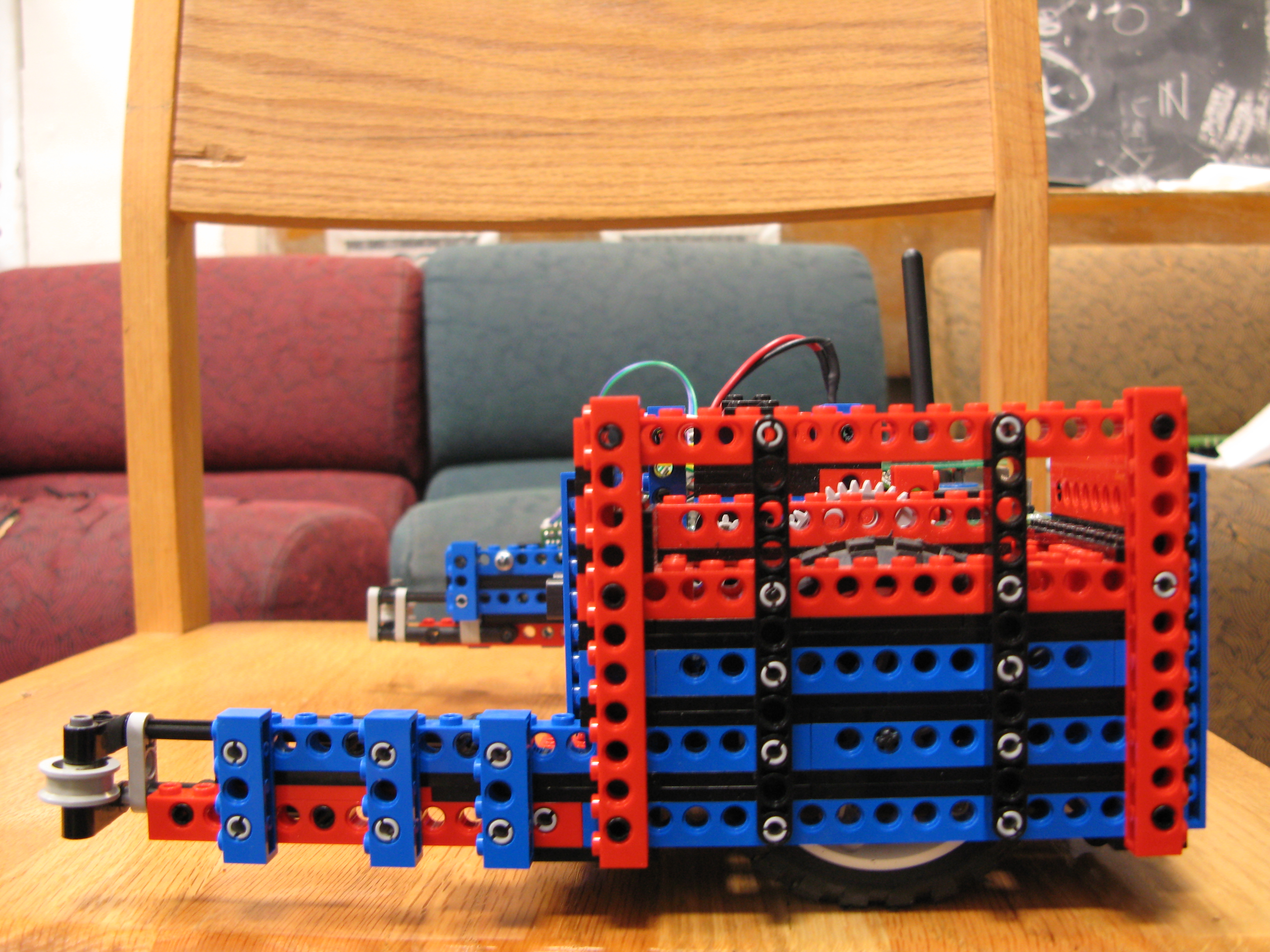
The Design of the robot was very simple. Our priority was to make a very strong and sturdy robot and therefore we decided to base the robot on the unbreakable cube. We suceeded pretty well at this and won the "Most likely to survive a drop test" award.
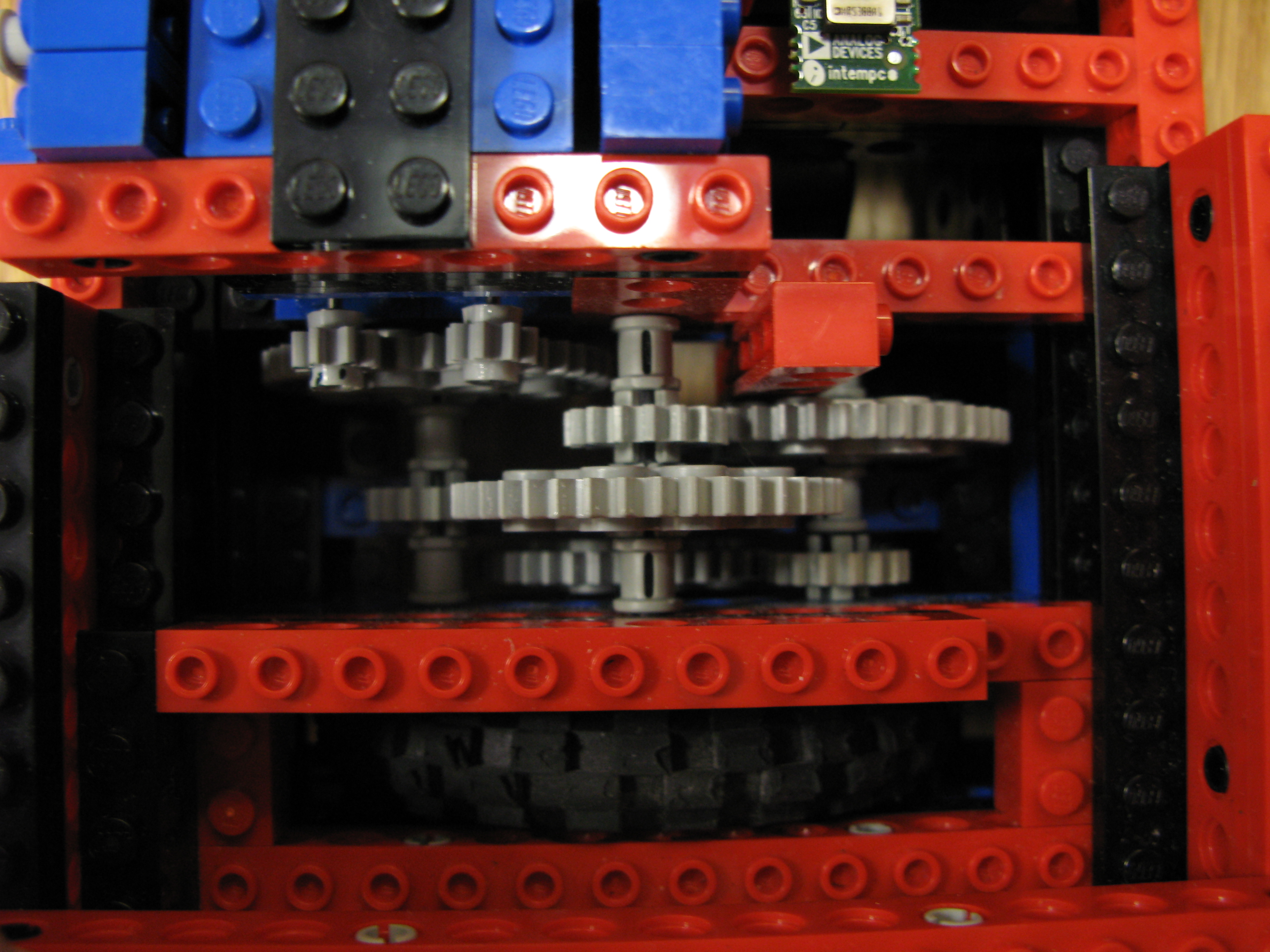
Our gear box was also carefully designed. We used a lot of bracing to make sure that it would last. There are two motors to a single gear in a 1:5 ratio, which is connected to a system of gears that forms a ratio of 625:8 between the motors and the wheels.
To collect the balls we also had two arm extensions that stuck out of the robot. This was probably the least structural part of the robot. On the end of the arms we put wheels so that in case the robot crashed against a wall the wheels would absorb the shock and push away from the wall