Strategy
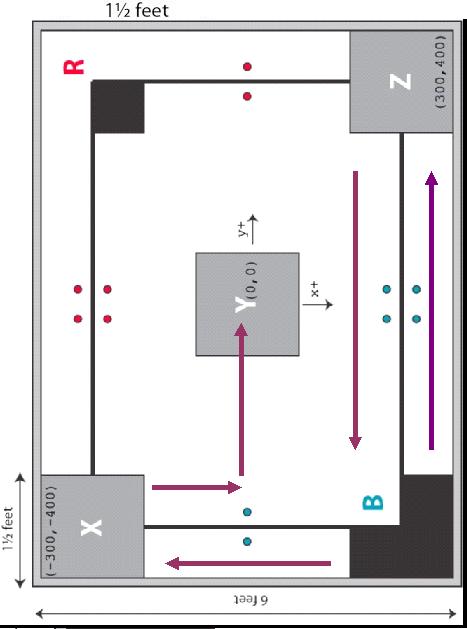
Our strategy was to create a robot that was simple in its design and function. We used only three basic functions: turn, drive straight and a function that made the robot reverse without any feedback. To straighten ourselves out after a turn we backed into the wall and recalibrated our position. Our strategy was simple in its steps:
1. Orient to face the four balls
2. Push the four balls into the corner on the opposite side
3. Come back to initial starting point
4. Turn towards the two balls
5. Push the two balls into the corner
6. Go to the center of the board
7. Spin like crazy