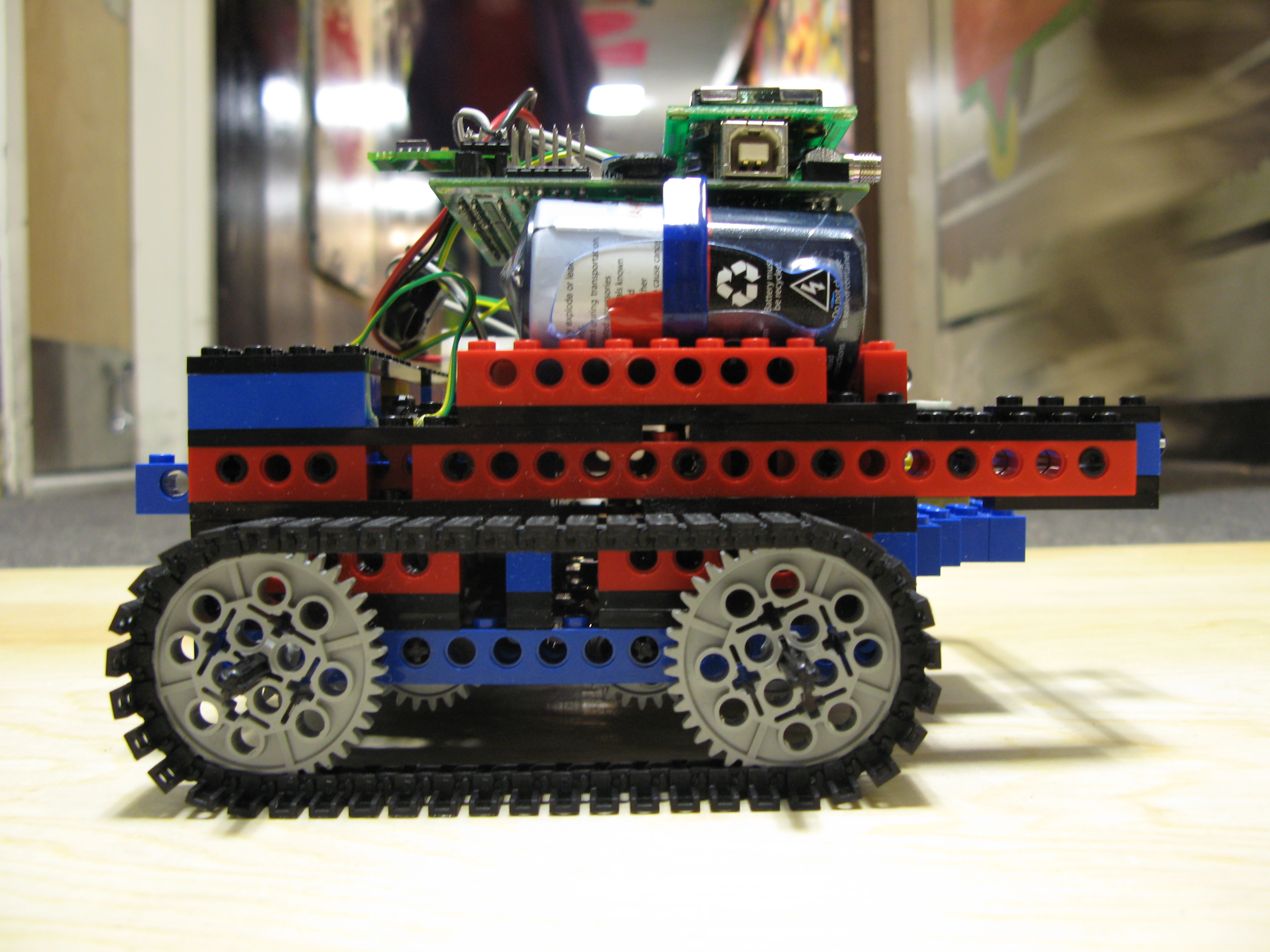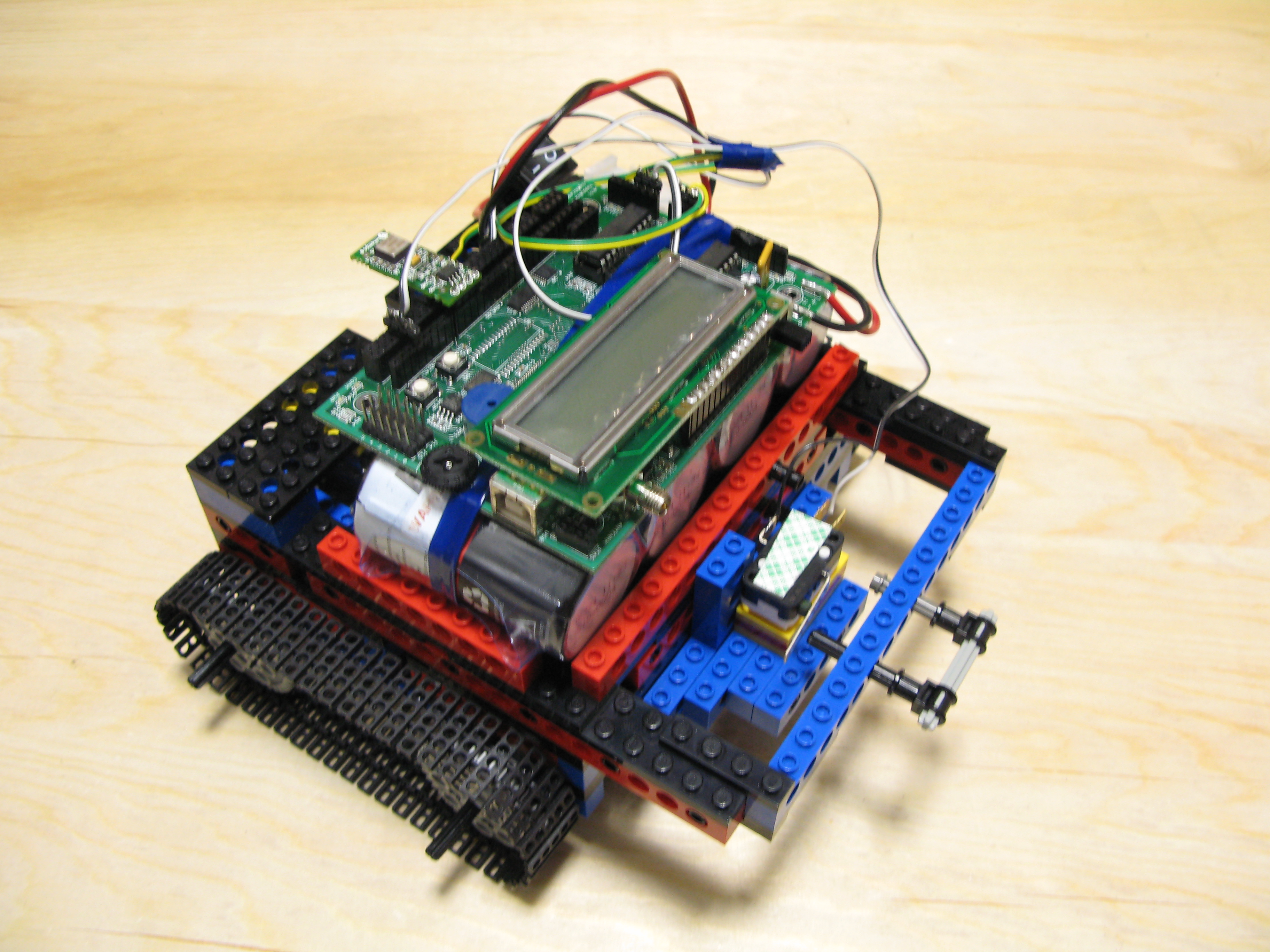
The two following pictures show the robot we built for the 3rd assignment. Haing a differential drive with four wheels turning didn't work to well because there was a lot of friction. When we replaced the wheels with treads the robot turned better but treads were more likely to break and thus we decided to abandon this idea for the final version of our robot.