|
|
| Results |
- Seeding: Second to last (37th)
- Pre-Competition: 2-0, all wins!
- Final Competition: 4-2, eliminated on 6th round
- Total Record: 6-2
|
|
| Game Board |
The game board consists of three score zones: two in opposite corners and one in the middle of the board. Two robots are placed on the board in opposite non-scoring corners. Each robot has six total balls that they can place in the score zones. The placement of the balls is shown below.
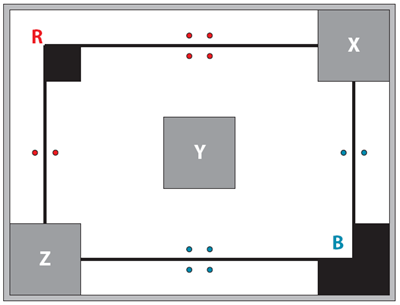
Each team is given 1 minute to calibrate their robots. After the calibration period, the robots compete for 1 minute to try to win as many score zones as possible. The team with the most of their balls in a score zone wins that score zone.
|
|
| Basic Strategy |
Our robot takes the group of four balls to the far corner using the arms and IR sensors (for line following). After reaching the far corner, one of the 4 balls should be within the robot, trapped in the ball gate. The robot backs out, closes its arms, turns around, and speeds back down to the starting corner. When the pressure sensor on the front of the robot is triggered, the robot assumes it has reached the starting corner, and turns to face the group of 2 balls. The robot follows the line to the 2 balls with its arms open. Upon reaching the group of 2 balls, the robot closes its arms, trapping the balls, and procedes to the score zone in the corner. Finally, the robot waits patiently for the round to end.
Idealy the robot should score 3 balls in one corner and 3 balls in another, hopefully winning 2 territories.
|
|
| Etc |
Our team deserves recognition for being one of the barely-held-together teams in the competition. With completely different schedules, all team members found it difficult to find a time to work together and really make progress. In the end, however, everything turned out well, and Special K was born.
That said, interesting things did happen while we were together. For instance, our electrical engineer nearly fried himself when he shorted the battery pack. The coder claimed to have a clever program for orienting arms that worked, however during seeding, his code crashed JoyOS and cost the team a horrible seeding position. IR sensors were bought about 3 times since half of them kept refusing to work. Eventually we found out that the IR receiver actually had a specific orientation, and regretted spending all the points on what we thought was defunct equipment.
But not all mistakes were made by the us. We still have no idea where our charger went! It disappeared during impounding. The Organizers/TAs were nice enough to let us adopt an abandoned charger however =).
And don't the coder (me) started on JoyOS...
|
|
|