| Faceplant | Specs | Strategy | Competition | Stories |
| Faceplant | Specs | Strategy | Competition | Stories |
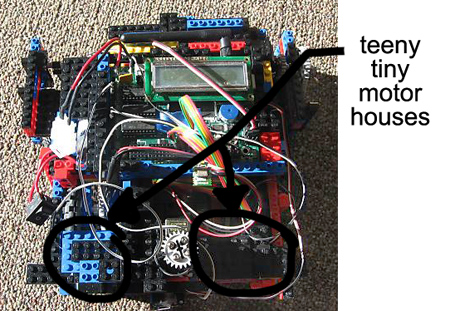 | The robot has 2 rear wheels, each powered by a single motor. The gears are horizontally and vertically stacked in a 125:1 ratio (we achieved a very compact gearbox). Motorhouses are located above each wheel. Gearbox walls are extended downward to approximately half the wheel height, to prevent balls from interfering with wheel/gear function. In addition, 2 castor wheels are located in the front, slightly more towards the outside. |
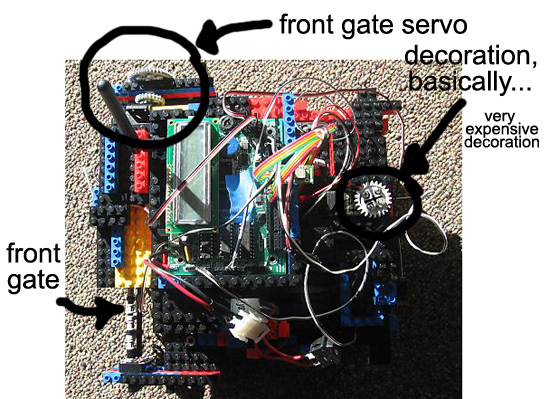
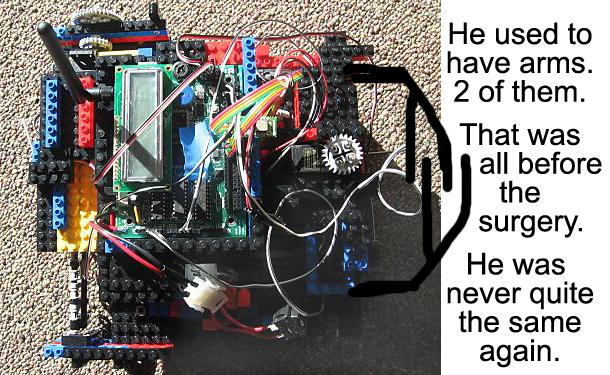
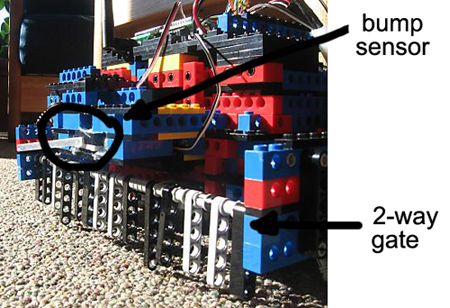
| The front gate is 2-way, with a movable long beam preventing the arms from swinging in one direction. A servo sets the location of the beam (either in front or behind the gate). We used to have a set of arms (big arms that could catch balls) on the other side of the robot. We had to take them off in the end. However, the back servo was already snug (and paid for), so we just left it alone. We also didn't want to risk making large structural changes just before competition. |
 |
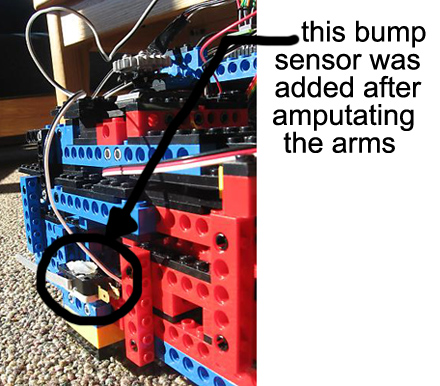
One of the (only) benefits of losing the extra arms was the ability to add another bump sensor. To our great dismay, the robot was unable to move backwards in a straight line. Switching the motors on the Happyboard caused the robot to veer unpredictably. Writing new moveBackwards() functions did not work either. As such, bump sensors caused the robot to stop whenever it encountered something on either side, so as to prevent (more) gear grinding.
Another strange thing we noticed was that the gyroscope worked decently well when moving forward, but the angle readings deviated enormously when turning. (After blaming the code for a while, we realized that we really had no idea why this was happening.) Even stranger, the turns were executed perfectly if the robot was already moving, but always overshot when if the robot turned from a stationary position (such as the beginning of the round).
| We had an awkward weight distribution. Our batteries were close to the ground and directly in the center of the robot. This would normally be fine, except that our steering wheels (the large ones) were all the way in the back. Most of the weight thus fell on the front castors (which held surprisingly well). We think this weight distribution may have contributed to the robot's inability to drive backwards. We'd also like to note that it was very inconvenient to put batteries where they cannot be easily removed, as structures will have to be built around them, and they are awkward to charge. Our batteries also had very short wires, so the Happyboard had to be placed directly atop them. They tended to tilt one way or the other, which caused us great grief while testing. | 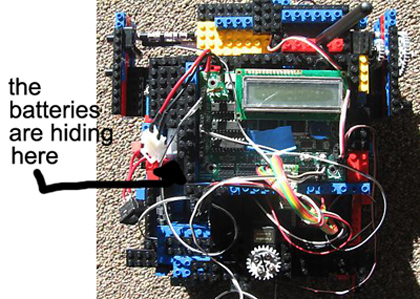 |
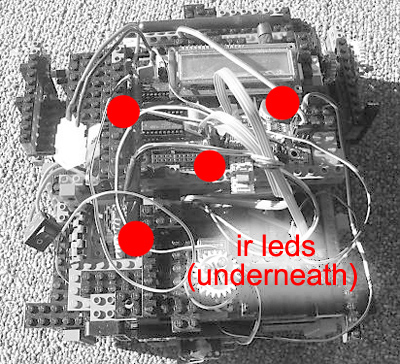 | Finally, in order to orient, we added 3 ir leds on the bottom. We also added one in the middle, because we thought we would resort to line-following if the gyroscope continued to behave unpredictably. Of course we never used this one, just the way we never used the back servo. (All just decorative...) |