Team 42 Website
Team Name: Skillz that Killz
· Sensors
· Experience and Competition Results
Ashish Misra (Class of 2008) EMAIL: ashish86@mit.edu
Lohith Kini (Class of 2008) EMAIL: lkini@mit.edu
Our robot is agile,
mobile and hostile. The best picture we have of our robot is its animal
analogue:

Our robot is lightweight and
small: 7 FLUs high by 35 FLUs wide by 38 FLUs long. Our main goal was to make
the robot agile and fast, to reach ours and opponents balls faster.
Our robot uses two motors to
drive 4 wheels (2 medium, 2 large) via a 125:1 ratio gear box. Initially, our
robot used a 75:1 ratio gear box but we felt we needed more power for torque
and increased the gear box features. Unfortunately, the change in the gear box
caused a lot of problems, including the inability to turn to any degree.
Our front side of the robot
has a ball compartment with no gate and the back side has a one way gate.
Unfortunately, the front side ball compartment opening was two small to capture
more than one ball in one swoop. The back one-way gate worked perfectly during
the competition and helped use capture balls.
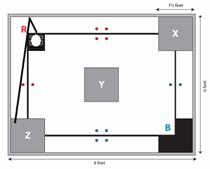
Our initial strategy was to:
![]() Orient ourselves to
point towards our 4-ball direction
Orient ourselves to
point towards our 4-ball direction
![]() Go straight and
place all 4 balls in corner score zone
Go straight and
place all 4 balls in corner score zone
![]() Turn 90º such
that back of robot is facing opponent’s 2-balls
Turn 90º such
that back of robot is facing opponent’s 2-balls
![]() Drive in reverse
to displace opponent’s 2-balls
Drive in reverse
to displace opponent’s 2-balls
![]() Turn 90º again
and drive across game board to retrieve our 2-balls
Turn 90º again
and drive across game board to retrieve our 2-balls
![]() Go backwards to
midway scoring zone.
Go backwards to
midway scoring zone.
A few problems occurred in
the last week of competition:
![]() Code started to
become bulk because of heavy dependence on RF
Code started to
become bulk because of heavy dependence on RF
![]() RF was never
reliable, which turned out to be true during both the seeding tournaments and
the actual competition
RF was never
reliable, which turned out to be true during both the seeding tournaments and
the actual competition
![]() Our changes in
our mechanical design prevented us from turning appropriately
Our changes in
our mechanical design prevented us from turning appropriately
We renewed our strategy on
the night of the qualifying tournament on Tuesday. Since we were signed up to
be tested last, we were quickly able to write a simple dirty algorithm that
used our robots mobility and hostility effectively. Our algorithm has two
cases:
Case 1: Our robot is directed
towards or away from the 4-balls
Case 2: Our robot is directed
towards or away from the 2-balls
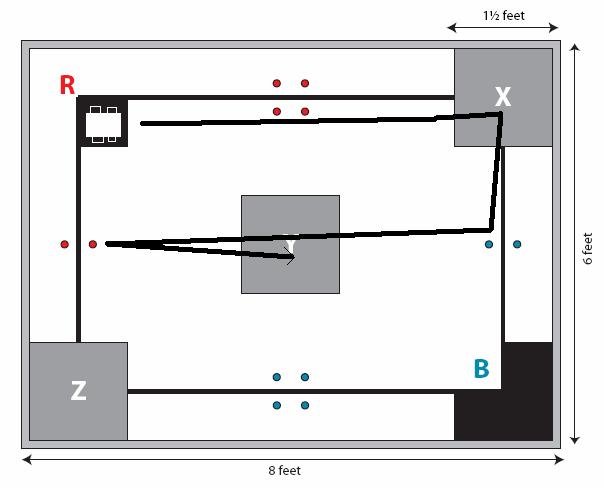
Our strategy simple goes
straight in the line of direction. If the robot is faced away from the balls in
the line of direction, then the robot moves in reverse to grab whichever set of
balls is in the line of motion and stays at the scoring zone to prevent the
opponent from scoring in that scoring zone. Our robot’s agility helps our robot
to reach the zone faster than the opponent but our robot’s small size is a
disadvantage against more bulkier heavier opponent robots.
The following is our simple
strategy code that we wrote up last minute.
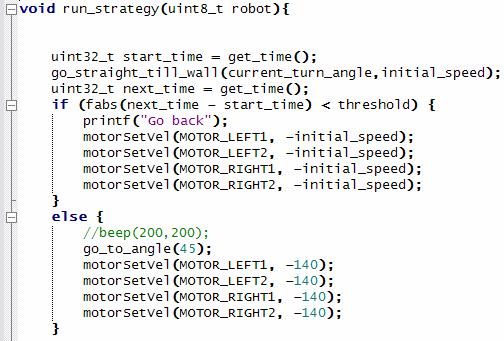
Notice, that when we go
straight, we try to turn to 45º and try to attack opponents balls. During
competition, the turn never occurred successfully.
We used the following on our
robot:
![]() Bump sensor to
let us know when we have reached a wall
Bump sensor to
let us know when we have reached a wall
![]() Gyro to help us
drive in a straight line of motion
Gyro to help us
drive in a straight line of motion
o
This sensor was
the most accurate of all sensors we tried or had to use for assignments during
the term
![]() We considered
using 2 phototransistors to determine orientation and placement of robot on
game board
We considered
using 2 phototransistors to determine orientation and placement of robot on
game board
![]() RF technology was
faulty and we decided not to use it at all
RF technology was
faulty and we decided not to use it at all
Our team had an enjoyable
time learning the science and engineering of LEGOs™ and sensors. One of the
team members, Lohith Kini, had previous robotics experience from MASLab. In
comparison, 6.270 was much simpler since all the parts were made out of LEGOs™
and hence made the experience that much more enjoyable. Ashish Misra engineered
and designed most of the mechanical, sensory, structural and strategic aspects
of the robot while Lohith Kini did some part of coding and helped solder the
different parts of the computer.
COMPETITION RESULTS
Our team reached the top 15
robots before it was eliminated. We were surprised that we even made it to the
finals competition since our simple dumb algorithm ended up winning in both
rounds of the qualification and seeding tournament. During this part of
competition, our robot faced two bulky robots that ended up getting stuck while
our robot grabbed at least 1 ball.
During the finals
competition, our first round was a double loss since our robot was faced in the
2 direction, meaning that our front small gate compartment wasn’t able to go
straight and grab any balls. We won the next two rounds because our robot was
facing reverse directions and our back one-way gate was very successful in
grabbing whatever balls were in its line of motion. The last round we lost even
though we grabbed 1 ball since the opponent robot (team 45) was able to score
in our scoring region because its bulkiness allowed it to push our robot aside
to place their balls.
If we had had a little more
time before the competition, we would have changed the front gate into a large
one-way gate and would have changed the gear ratio back to 75:1 as before to
undo whatever problem caused the inability to spin.