- Melissa "Why am I hosed over IAP?" Hunt
- Rachel "sleep is a lie" Meyer
- Freddie - even though that is longer than our team name
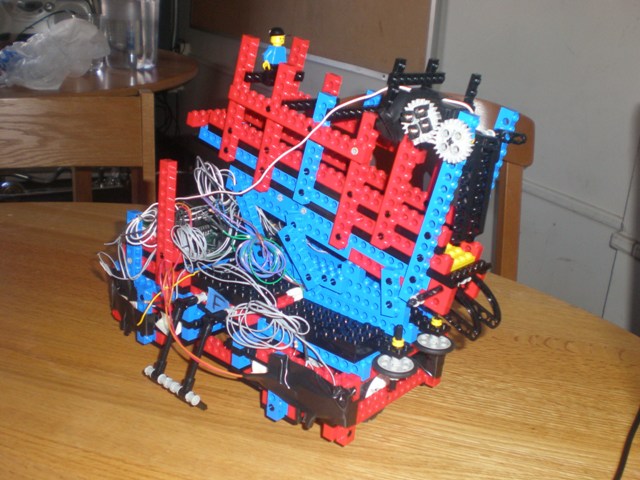
- 1:75 gear ratio for two driving wheels and a undriven castor
- One ramp for 6 balls with a servo controlled gate.
Team members:
|
|
The Lego Autonomous Robot Design Competition, known to MIT students as 6.270, is held every IAP (Independent Activities Period) at MIT. Using only Legos for the structure and gear trains, and a Happyboard to control the robot, each team of 2-3 students works for 4 weeks to create a robot that is fully autonomous and can compete against other robots to score the most points in a competition round.
This year's competition theme was "Oregon Trail." There were three holes on each side of the contest table, each hole leading to a scoring bin. Points are earned when the robots put balls into the middle bin on their side, or the end bins on the other side.

Freddy was the product of impulsive building. We started with Ross's Awesome Car then chopped it in to a few pieces. When we put him back together better we added a lot of new "features" including a castor with 360 degrees rotation, a mid-section to widen the chassis, and an enclosure to hold the battery pack. We added a motor to each side gear downed by a factor of 75.

The next big project was to add some mechanism that could actually score balls (sometimes). We chose a slanted ramp so we could use gravity to roll balls off our bot into the scoring bins. The balls are held in by a gate of lever arms that is opened and closed by a servo mounted on top of the ramp. This ramp was generally stable and reliably, but it was fairly easy to detach the entire ramp from Freddy's base.
The only sensors we used were three light sensors for orientation, a gyroscope for turning, and encoders for judging distance travelled. We used both IR and visible LED and phototransistor pairs for telling black and white apart to determine which side of the board and which orientation we are starting in. The gyro is used to make 90, 180, and 270 degree turns. The encoders were used to track the distance we travelled along the board.
We went with a simple and defensive strategy and went with slow and (usually) steady driving. First we used three LED and photoransitor pairs to determine our initial position and orientation. Then we turned so we were facing the long wall with scoring bins. The next 40 some seconds were the defensive section of our strategy. Freddy drove forward and blocked the opponents four point bin for 35 seconds. Next Freddy would drive forward to his own two point bin and (hopefully) drop all six of his balls into the bin to score 12 points. His final move would be to return to the opponent's four point bin and block for the rest of the round.
The mechanics of Freddy were fairly simple to implement, but we did run into a few programming issues. Getting the encoders and gyroscope functioning was trickier than we expected. Mainly, we had a lot of issues getting Freddy to drive straight. We tried using both the gyro and the encoders for driving straight and that produced many hours of failing and flailing, but eventually we got the gyroscope to work and make Freddy drive fairly straight.
The other main issue we had was Freddy was not too reliable in driving straight, so by the time he got to his two point goal he was one to eight inches away from the wall. He if was too close to the wall he would get stuck and not make it to the goal, but if he was too far away then the balls would not be able to roll into the goal. If Freddy was somewhere in between those positions then he could score all six balls by dropping them over the wall or rolling them under, except for one tricky position where they would bounce off the wall.
Freddy was lucky enough to be one of the few bots that scored twelve points during the morning qualifying rounds, many of the 29 robots failed to score any points during qualifying (even against placebos). Unfortunately, when the final competition came Freddy had a bad case of stage fright and decided that he didn't like all the people looking at him. There was also a popular conspiracy theory that the newly made board was causing all the robots to fail...
Not that you'll listen...